Генеративные модели
Ранее мы в основном работали с размеченными данными. Мы научили нейронные сети решать задачи классификации, регрессии, сегментации и т.д. На входе модели у нас были исходные данные, по которым мы учились предсказывать целевые значения (метки классов, действительные числа, маски сегментации и т.д):
$$\large \text{Входные данные} \xrightarrow[\text{}]{\text{Модель}} \text{Целевые значения}$$Математически это можно записать как:
$$\large X \xrightarrow[\text{}]{f_{θ}(x)} Y$$где $X$ — множество входных данных, $Y$ — множество целевых значений, $f_{θ}(x)$ — модель с настраиваемыми параметрами $θ$.
По сути наша модель — это сложная функция, которая ставит в соответствие каждому объекту $x$ из множества входных данных $X$ целевое значение $y$ из множества выходных данных $Y$: $$y = f_{θ}(x)$$
С задачей генерации дела обстоят сложнее, ведь в задаче генерации мы хотим научить модель генерировать объекты, которых не было в исходной выборке.
Постановка задачи генерации
Дано: данные, часто неразмеченные.
Результат генерации: новые данные, которые будут удовлетворять следующим условиям:
Вход модели: ❓
Дополнительно:
Итого не очень понятно, что должно подаваться на вход модели и как обеспечить элемент случайности. В большинстве моделей генерации в качестве входных данных для модели используют гауссовский или равномерный шум.
$$\large \text{Шум} \xrightarrow[\text{}]{\text{Модель генерации}} \text{Cгенерированный объект}$$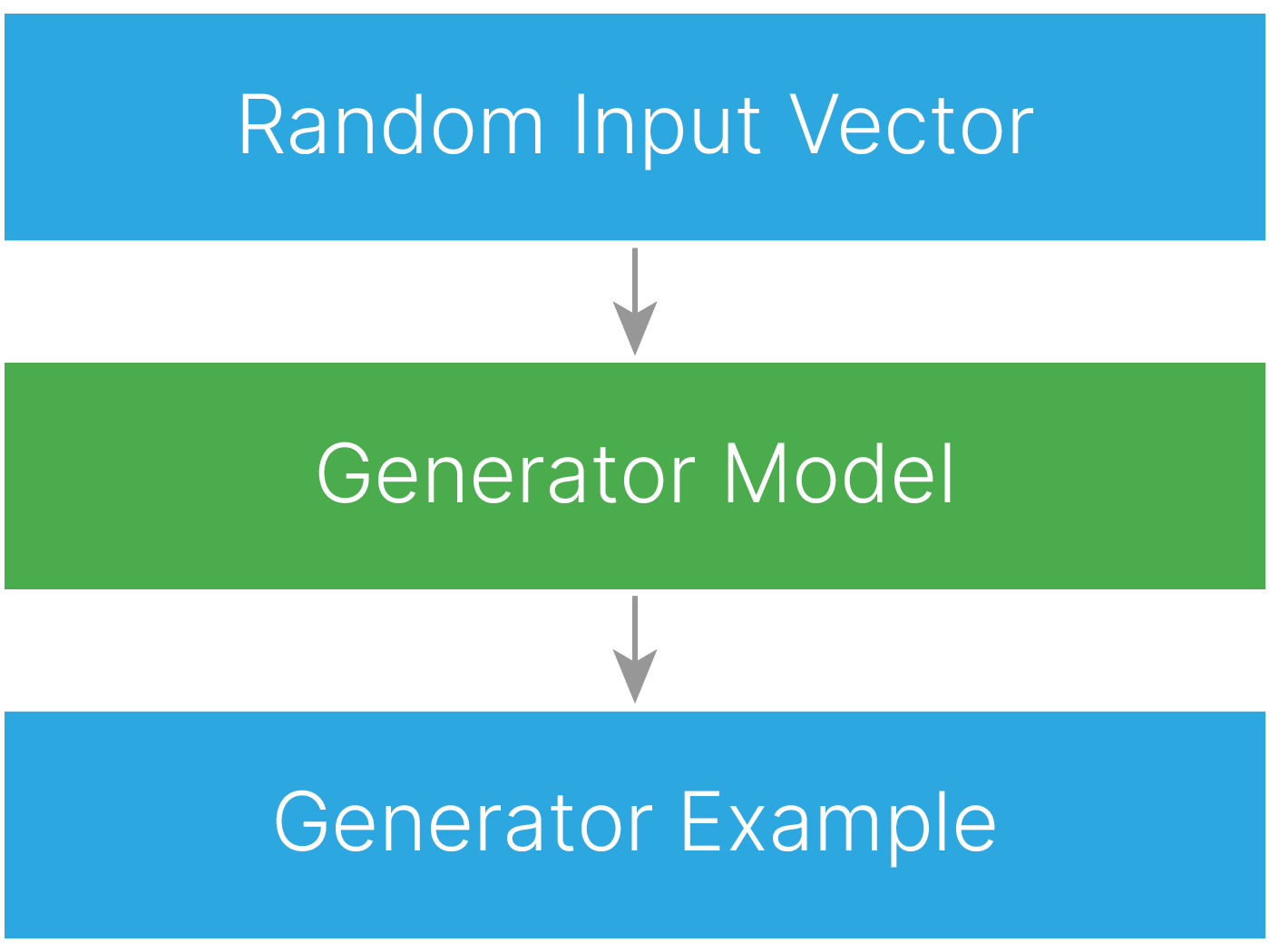
Математически это можно записать, как
$$\large Z \xrightarrow[\text{}]{g_{θ}(z)} X$$где $Z$ — хорошо изученное множество (например, нормальное гауссово распределение), из которого мы умеем семплировать объекты, $X$ — множество всех возможных объектов с неизвестным распределением или известным распределением, из которого мы не умеем семплировать.
По сути модель генерации — это сложная функция, которая ставит в соответствие выборке из известного распределения $z$ объект из целевого распределения $x$: $$x = g_{θ}(z)$$
Чтобы обеспечить воспроизводимость примеров, установим сиды:
import torch
import random
import numpy as np
def set_random_seed(seed):
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
np.random.seed(seed)
random.seed(seed)
set_random_seed(42)
Предположим, у нас под рукой есть генератор случайных чисел, который позволяет нам легко получить случайные числа в диапазоне $[0,1]$:
import pandas as pd
import seaborn as sns
import matplotlib.pyplot as plt
u1 = np.random.uniform(size=1000)
u2 = np.random.uniform(size=1000)
data = pd.DataFrame.from_dict(dict(zip(["U1", "U2"], [u1, u2])))
sns.jointplot(data=data, x="U1", y="U2")
plt.show()

Пусть $U_i$ — точка, которую даёт нам генератор равномерно распределенных случайных чисел. Если мы возьмём пару таких точек $U_1$, $U_2$ и произведём с ними так называемое преобразование Бокса-Мюллера 📚[wiki], то получим пару новых точек $X$ и $Y$ на вещественной прямой:
Повторив такую процедуру для большого числа точек $U_i$, можно заметить, что распределение для объектов $X$ и $Y$ становится похожим на стандартное нормальное:
r = np.sqrt(-2 * np.log(u1))
theta = 2 * np.pi * u2
x = r * np.cos(theta)
y = r * np.sin(theta)
data["X"] = x
data["Y"] = y
sns.jointplot(data=data, x="X", y="Y")
plt.show()

На самом деле мы можем в точности доказать, что преобразование Бокса-Мюллера преобразовало исходное равномерное распределение в стандартное нормальное. Доказательство 📚[book].
Можно раскрасить точки выборки и посмотреть, как именно они преобразуются:
color = np.sqrt(u1 * u1 + u2 * u2) # for visualization
color = color / color.max()
data["color"] = color
f, ax = plt.subplots(1, 2, figsize=(14, 6))
cmap = sns.color_palette("Spectral", as_cmap=True)
sns.scatterplot(
data=data,
x="U1",
y="U2",
hue="color",
palette=cmap,
ax=ax[0],
legend=False,
)
sns.scatterplot(
data=data, x="X", y="Y", hue="color", palette=cmap, ax=ax[1], legend=False
)
plt.show()

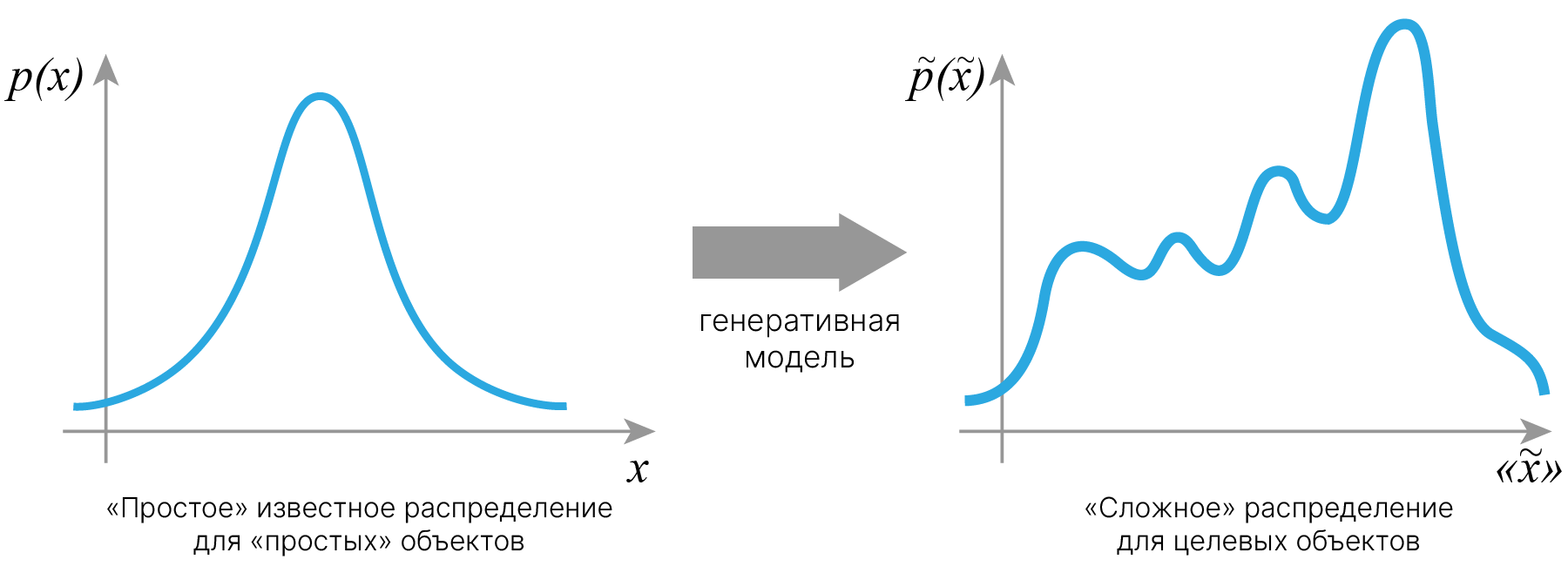
Что делать, если нам хочется сгенерировать объекты не в стандартном нормальном распределении, а в каком-то более сложном? В общем случае нам необходимо подобрать некоторую функцию, которая будет отображать объекты из известного "простого" распределения в "целевое". Осуществляющие такое преобразование функции будем называть генеративными моделями.
Если целевое распределение $\mathcal{F}[\vec {x}]$ известно аналитически, то для подбора такой функции можно воспользоваться различными модификациями алгоритма Markov Chain Monte Carlo 📚[wiki].
[video] 📺 Behind the Scenes of GANs, VAEs and Flow-based Generative Models
Существует четыре основных типа алгоритмов генерации, основанных на глубоком обучении:

В качестве входа модели используют вектор независимых случайных величин. Почему именно вектор? Почему не одно случайное число?
Ответ: входной вектор можно рассматривать как признаки генерируемого объекта. Если мы будем передавать только одно случайное число, то генерация будет однообразной. Чем больше признаков (степеней свободы) у входного вектора, тем разнообразнее будет результат генерации.
То есть случайный шум большей размерности даёт нам больше вариабельности для генерации. Это называется input latent space — входное латентное пространство.
Note: из-за неустоявшейся терминологии случайное распределение на входе генератора называется латентным пространством так же, как и скрытое пространство в автоэнкодерах. Поэтому в этой лекции будем называть его входным латентным пространством. Также в статьях встречается вариант: predefined latent space.
Каждую компоненту латентного пространства можно рассматривать как отдельную шкалу, вдоль которой изменяются определенные свойства генерируемых объектов. Например, можно выбрать четыре латентных вектора и посмотреть, как генерируемые объекты плавно изменяются при переходе от одного вектора к другому.

В выборе размерности входного латентного пространства важно соблюсти баланс.
Пример: генератор лиц с входным вектором длины 1. Результатом работы генератора будет всего одна шкала, вдоль которой будут расположены генерируемые изображения. Сеть скорее всего не сможет выдавать все многообразие объектов, она выучит небольшую часть: например, при изменении значений будет выдавать от молодой женщины блондинки до пожилого мужчины брюнета. У такой сети будет низкая вариабельность — она не сможет сгенерировать, например, рыжего ребенка в очках.
При обучении модели количество точек в этом латентном пространстве будет настолько мало, что в основном пространство будет состоять из пустот. Тогда модель будет крайне некачественно генерировать объекты в точках латентного пространства, далеких от точек обучающей выборки.
Лучший способ выбрать длину вектора — это найти публикацию с похожей задачей и взять значение из нее. Если такой информации нет, то придется экспериментировать. Лучше начинать с низкой размерности латентного пространства, чтобы наладить работу всей сети, пусть и с низким разнообразием, а затем проводить эксперименты по поиску оптимальной размерности.
Можно использовать собственные знания в предметной области: спросите себя, сколькими вещественными числами можно описать важную информацию об объекте.
Как мы уже знаем, инициализация весов и нормализация входных данных вносят существенный вклад в работу модели. Поэтому принято использовать многомерное нормальное распределение для входного латентного пространства. Оно лучше взаимодействует с весами модели и улучшает сходимость.
В этой лекции мы будем использовать lightning для обучения и tbparse для визуализации логов.
from IPython.display import clear_output
!pip install -q --upgrade diffusers transformers accelerate
!pip install -q torchmetrics[image]
!pip install -q lightning tbparse
clear_output()
Зафиксируем сиды для воспроизводимости результатов:
import torch
import random
import numpy as np
def set_random_seed(seed):
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
np.random.seed(seed)
random.seed(seed)
set_random_seed(42)
Попробуем собрать генератор точек неизвестной функции. В качестве функции будем использовать параболу. Для начала напишем код, который будет создавать истинные точки:
import numpy as np
import matplotlib.pyplot as plt
def create_pair(num=100):
x = np.random.uniform(low=-1, high=1, size=(num,))
y = x * x
return np.hstack(
(x.reshape(-1, 1), y.reshape(-1, 1))
) # Create num of correct dots(x,y) on parabola
pairs = create_pair(100)
plt.scatter(pairs[:, 0], pairs[:, 1])
plt.title("Random dots on parabola,\nwhich will use like a dataset.")
plt.show()

Напишем датасет, который будет выдавать случайный шумовой вектор входного латентного пространства размерностью ls = 1 и истинные объекты.
Мы заранее создаем в функции __init__ точки, которые будем считать истинными.
import torch
from torch.utils.data import DataLoader, Dataset
# Define input parameters
n_batches = 30
batch_size = 128
ls = 1 # latent space
class ParabolaDS(Dataset):
def __init__(self, n_batches, batch_size, ls):
# create ground true item
self.xy_pair = torch.tensor(
create_pair(num=(n_batches * batch_size)), dtype=torch.float
)
self.ls = ls
def __len__(self):
return self.xy_pair.shape[0]
def __getitem__(self, idx):
# get ground true item
item = self.xy_pair[idx]
# generate random noise
noise = torch.randn(self.ls, dtype=torch.float)
return item, noise
trainset = ParabolaDS(n_batches, batch_size, ls)
train_loader = DataLoader(trainset, batch_size=batch_size, shuffle=True, num_workers=2)
Определим простую модель, которая будет ожидать шум на входе и генерировать точки на выходе. Обратите внимание, что функция активации на последнем слое отсутствует, поскольку мы не ограничиваем наш генератор каким-то диапазоном.
import torch.nn as nn
class Generator(nn.Module):
def __init__(self, latent_space, hidden_dim=50):
super().__init__()
self.model = nn.Sequential(
nn.Linear(latent_space, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, 2),
) # x,y
def forward(self, x):
return self.model(x)
Напишем функцию для оценки качества работы модели.
Так как мы не знаем, в каком месте параболы генератор создаст новую точку, то непонятно, с каким элементом из датасета ее сравнивать.
Вариант №1 (задача уже решена)
Для сгенерированного $x$ аналитически вычислять $y_{\text{target}}=x*x$ и считать разницу между $y$, сгенерированным моделью, и $y_{\text{target}}$, вычисленным аналитически:
def custom_loss(pair, label):
# All inputs are batches
x_fake = pair[:, 0]
y_fake = pair[:, 1]
return torch.abs(x_fake * x_fake - y_fake).mean() # average by batch
Это будет работать.
Однако если мы знаем способ точно предсказать выход по входу, то задача уже решена и нейронная сеть не нужна.
Вариант №2 (как не надо делать)
Найти в датасете точку $ \text{target} = (x_{\text{target}},y_{\text{target}})$, наиболее близкую к созданной генератором $ \text{generated} = (x,y)$, и использовать расстояние между этими точками в качестве функции потерь.
$$\large \text{Loss} = \min(\text{dist}(\text{target}_{i},\text{generated}))$$В пространстве высокой размерности такой поиск будет весьма ресурсозатратным, но в нашем учебном примере работать будет.
class Loss(nn.Module):
def __init__(self, targets):
super().__init__()
self.targets = targets # Remember all real samples, impossible in real world
def forward(self, input, dummy_target=None):
dist = torch.cdist(input, self.targets) # claculate pairwise distances (euc.)
min_dist, index = torch.min(dist, dim=1) # take the best
return min_dist.mean()
Основной код обучения:
import lightning as L
# DON'T USE IT! IT'S NAIVE DECISION!
class NaiveGAN(L.LightningModule):
def __init__(self, model, criration):
super().__init__()
self.model = model
self.criration = criration
def configure_optimizers(self):
self.criration.targets = self.criration.targets.to(
self.device
) # for fix device diff
optimizer = torch.optim.Adam(self.model.parameters(), lr=1e-3)
return optimizer
def training_step(self, batch, batch_idx):
real_items, noises = batch
gen_items = self.model(noises)
loss = self.criration(gen_items, real_items)
self.log("loss/train", loss, on_epoch=True, on_step=False)
return loss
Целевые точки из датасета запоминаются в loss, затем идет обычный цикл обучения:
!mkdir log_naive/
!mkdir log_naive/lightning_logs
from warnings import simplefilter
simplefilter("ignore", RuntimeWarning)
num_epochs = 10
criterion = Loss(trainset.xy_pair) # save target
model = Generator(latent_space=ls)
pl_model = NaiveGAN(model, criterion)
trainer = L.Trainer(
max_epochs=num_epochs,
logger=L.pytorch.loggers.TensorBoardLogger(save_dir="./log_naive/"),
log_every_n_steps=10,
)
trainer.fit(
model=pl_model,
train_dataloaders=train_loader,
)
INFO: GPU available: True (cuda), used: True INFO:lightning.pytorch.utilities.rank_zero:GPU available: True (cuda), used: True INFO: TPU available: False, using: 0 TPU cores INFO:lightning.pytorch.utilities.rank_zero:TPU available: False, using: 0 TPU cores INFO: IPU available: False, using: 0 IPUs INFO:lightning.pytorch.utilities.rank_zero:IPU available: False, using: 0 IPUs INFO: HPU available: False, using: 0 HPUs INFO:lightning.pytorch.utilities.rank_zero:HPU available: False, using: 0 HPUs INFO: LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0] INFO:lightning.pytorch.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0] INFO: | Name | Type | Params ---------------------------------------- 0 | model | Generator | 2.8 K 1 | criration | Loss | 0 ---------------------------------------- 2.8 K Trainable params 0 Non-trainable params 2.8 K Total params 0.011 Total estimated model params size (MB) INFO:lightning.pytorch.callbacks.model_summary: | Name | Type | Params ---------------------------------------- 0 | model | Generator | 2.8 K 1 | criration | Loss | 0 ---------------------------------------- 2.8 K Trainable params 0 Non-trainable params 2.8 K Total params 0.011 Total estimated model params size (MB)
Training: | | 0/? [00:00<?, ?it/s]
INFO: `Trainer.fit` stopped: `max_epochs=10` reached. INFO:lightning.pytorch.utilities.rank_zero:`Trainer.fit` stopped: `max_epochs=10` reached.
Посмотрим, куда были сохранены логи:
log_dir = pl_model.logger.log_dir
log_dir
'./log_naive/lightning_logs/version_0'
Визуализируем кривую обучения, чтобы удостовериться, что модель учится:
from tbparse import SummaryReader
def visualization(log_dir):
# visualization without TensorBoard for TensorBoard logs
clear_output()
reader = SummaryReader(log_dir)
df = reader.scalars.drop_duplicates()
uniq = set(df.tag.unique())
uniq.remove("epoch")
uniq = list(uniq)
uniq.sort()
i = 0
ax_dict = {}
for item in uniq:
metric = item.split("/")[0] # log shoud have tag
if metric not in ax_dict:
ax_dict[metric] = i
i += 1
fig, axs = plt.subplots(len(ax_dict), 1, figsize=(12, 3.5 * len(ax_dict)))
for item in uniq:
metric = item.split("/")[0]
if len(ax_dict) > 1:
ax = axs[ax_dict[metric]]
else:
ax = axs
sub_df = df[df["tag"] == item]
ax.plot(sub_df.step, sub_df.value, label=item)
ax.set_ylabel(metric)
ax.legend()
ax.set_xlabel("iter")
plt.grid()
plt.show()
visualization(log_dir)

Посмотрим результаты генерации на шуме:
def test_image(pair_gen, pairs, figsize=None):
if figsize:
plt.figure(figsize=figsize)
plt.scatter(pairs[:, 0], pairs[:, 1], label="real")
plt.scatter(pair_gen[:, 0], pair_gen[:, 1], label="generated")
plt.axis([-1, 1, 0, 1])
plt.legend()
plt.xlabel("x")
plt.ylabel("y")
plt.grid()
plt.show()
model.eval().to("cpu")
noise = torch.tensor(np.random.normal(size=(1000, ls)), dtype=torch.float)
with torch.no_grad():
pair_gen = model(noise).detach().numpy()
test_image(pair_gen, pairs)

Видно, что модель генерирует точки, лежащие на параболе, но при этом они лежат в небольшом интервале около $0$. Это можно объяснить тем, что значения ошибок около нуля в среднем меньше, ведь $y$ около $0$ принимает небольшой диапазон значений.
В loss мы прописали, что сгенерированная точка должна лежать на параболе, и модель обучилась. Но информацию о том, в каких частях кривой должны оказаться точки, мы в loss никак не кодировали. Более того, модель может научиться хорошо генерировать одну единственную точку, и при этом loss может стать нулевым.
Кроме того, в loss сейчас хранятся все известные точки. Если бы мы генерировали не точки, а изображения или спектры, мы бы получили переполнение оперативной памяти.
Итак, надо решить две проблемы:
Будем наказывать нейронную сеть не с помощью функционала ошибок , а второй сетью, которая будет определять, лежит ли сгенерированная точка на параболе.
Создадим сеть-классификатор точек, которую назовём дискриминатор.
class Discriminator(nn.Module):
def __init__(self, hidden_dim):
super().__init__()
self.model = nn.Sequential(
nn.Linear(2, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, 1), # real/fake
nn.Sigmoid(),
)
def forward(self, x):
return self.model(x)
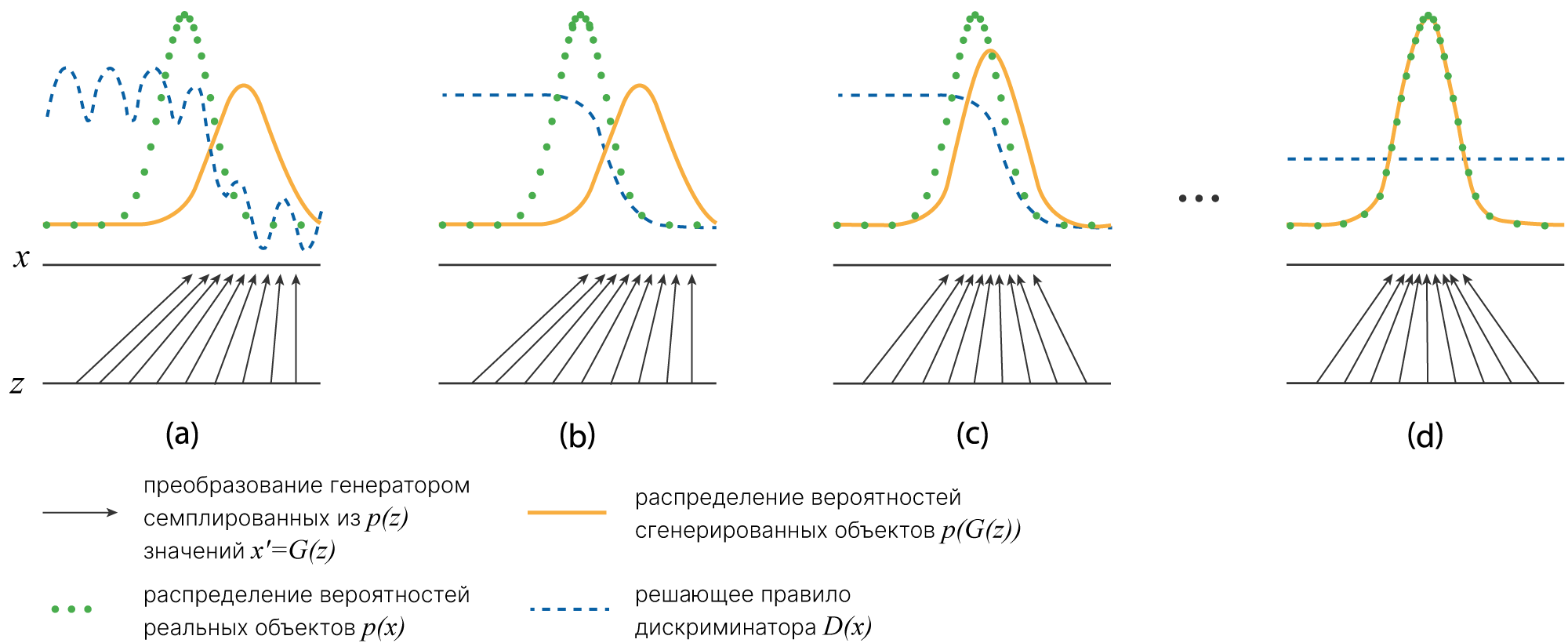
В общем случае задача дискриминатора — определять, принадлежит ли объект к распределению обучающей выборки. Если предсказания генератора выродятся в одно значение, дискриминатор легко запомнит, что эти точки — сгенерированные.
Итого мы имеем:
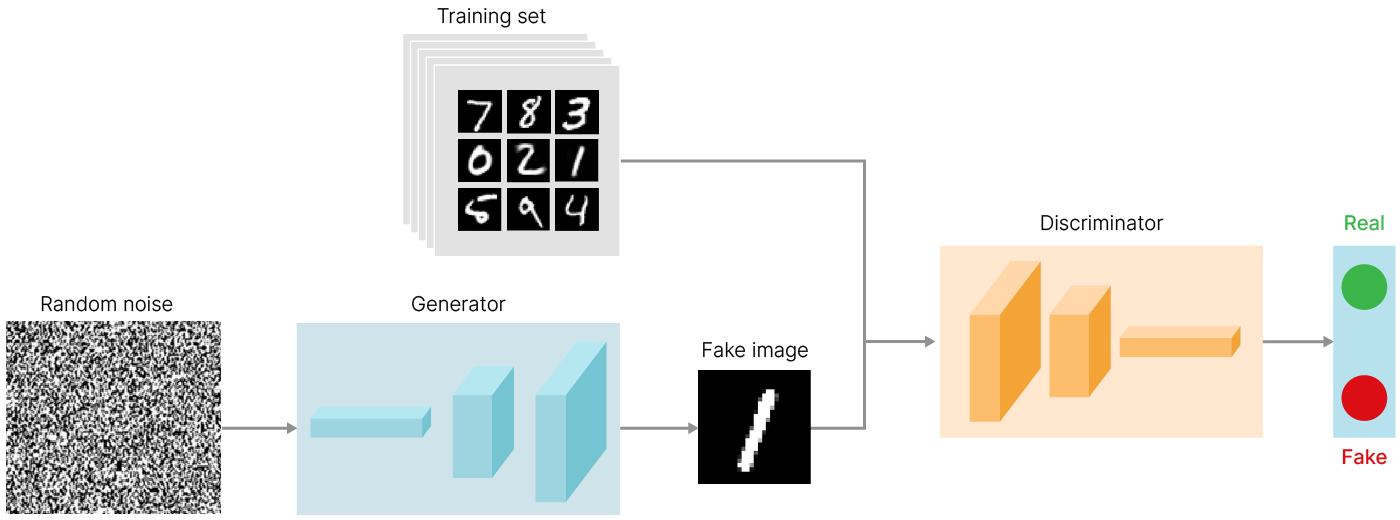
Мы будем подавать в дискриминатор правильные точки, помечая их реальными, и точки, которые выдаёт генератор, считая их подделкой. Генератор будет учиться подражать реальным данным, а дискриминатор будет учиться отличать реальные точки, от подделок.
Мы пришли к идее генеративно-состязательных нейронных сетей (Generative Adversarial Network).

Генеративно-состязательную сеть описал Иан Гудфеллоу из компании Google (на тот момент) в 2014 году. Принцип состязательности в сети GAN часто объясняют на примере из теории игр.
Полезное:
Математически можно описать идею GAN как игру 📚[wiki] двух игроков:
Задача фальшивомонетчика — обмануть банкира. Задача банкира — отличить реальные деньги от фальшивых.

Фальшивомонетчику необходим элемент случайности $z$.
Можно привести аналогию: если все фальшивые купюры будут иметь одинаковый номер, банкиру будет очень просто определить подделку.
Фальшивомонетчик берет на вход шум $z$ и генерирует фальшивую пачку денег $G(z)$.
Банкир $D$ получает на вход пачку купюр $x$, проверяет их подлинность и сообщает вектор $D(x)$, состоящий из чисел от нуля до единицы — свою уверенность (вероятность) по каждой купюре в том, что она настоящая.
Цель банкира (дискриминатора): отличить реальные деньги от фальшивых
$$D(x_i) = 1, \text{ для } x_i - \text{real},$$$$D(G(z_i)) = 0, \text{ для } G(z_i) - \text{ fake},$$то есть максимизировать $\log(D(x))+\log(1-D(G(z)))$.
Цель фальшивомонетчика (генератора): убедить банкира в том, что подделки настоящие
$$D(G(z_i)) = 1, \text{ для } G(z_i) - \text{ fake},$$то есть минимизировать $\log(1-D(G(z)))$.
Математически это можно записать, как:
$$\large \min\limits_{\theta_g} \max\limits_{\theta_d} ([\mathbb{E}_{x _\sim p(x)} \log(D_{\theta_d}(x)]+\mathbb{E}_{z _\sim p(z)} [\log(1-D_{\theta_d}(G_{\theta_g}(z))]),$$где $\theta_g$ — параметры генератора, $\theta_d$ — параметры дискриминатора, $p(x)$ — распределение вероятностей целевых объектов, $p(z)$ — распределение вероятностей входного шума.
Дискриминатор (банкир):
Генератор (фальшивомонетчик):
В процессе совместного конкурентного обучения, если система достаточно сбалансирована, достигается минимаксное состояние равновесия, в котором обе сети эффективно учатся.
Определим наши генератор и дискриминатор:
class Generator(nn.Module):
def __init__(self, latent_space, hidden_dim):
super().__init__()
self.model = nn.Sequential(
nn.Linear(latent_space, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, 2),
) # x,y
def forward(self, x):
return self.model(x)
class Discriminator(nn.Module):
def __init__(self, hidden_dim):
super().__init__()
self.model = nn.Sequential(
nn.Linear(2, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Linear(hidden_dim, 1), # real/fake
nn.Sigmoid(),
)
def forward(self, x):
return self.model(x)
Определим входные параметры. Для обучения GAN'а нужно много реальных объетов.
latent_dim = 10 # latent space
num_epochs = 1
n_batches = 10000
batch_size = 32
Обратите внимание, что у нас так же, как и в первом примере, есть переменная latent space. Это тот шум, из которого мы будем генерировать наши точки.
Дискриминатор решает задачу бинарной классификации. Для этой задачи хорошо подходит BCELoss 🛠️[doc] (Binary Cross-Entropy).
Процесс обучения GAN
Обучение дискриминатора:
loss_disc_real,
По аналогии с игрой: в этот момент банкир изучает реальные купюры, чтобы усовершенствовать машинку для проверки денег.
loss_disc_fake,
По аналогии с игрой: в этот момент банкир изучает фальшивые купюры, чтобы усовершенствовать машинку для проверки денег.
По аналогии с игрой: в этот момент банкир модифицирует машинку.
Обучение генератора:
loss_gen (подмена меток),Обратите внимание, что вместо решения minmax задачи мы подменяем метки. Это часто применяемый трюк 🐾[git] при обучении GAN.
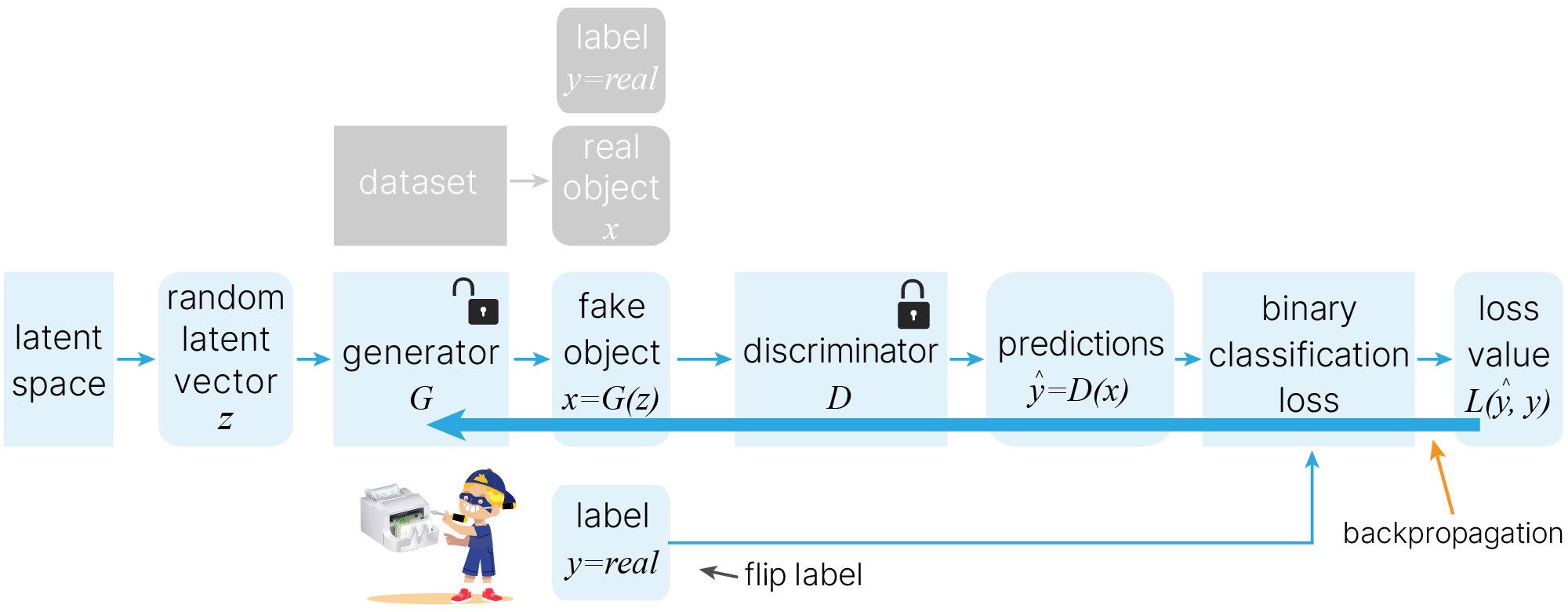
По аналогии с игрой: фальшивомонетчик не просто генерирует подделки наудачу. Он добывает прибор для распознавания подделок, разбирает его, смотрит, как тот работает, и затем создает подделки, которые смогут обмануть этот прибор.
Посмотрим, как это реализуется в коде обучения:
class GAN(L.LightningModule):
def __init__(
self,
generator,
discriminator,
lr=3e-4,
betas=(0.9, 0.999),
noise_in_place=False,
latent_dim=10,
):
super().__init__()
self.automatic_optimization = False # for hand made settings
self.generator = generator
self.discriminator = discriminator
self.criterion = nn.BCELoss()
self.real_label = 1.0
self.fake_label = 0.0
self.lr = lr
self.betas = betas
self.noise_in_place = noise_in_place
self.latent_dim = latent_dim
def configure_optimizers(self):
opt_gen = torch.optim.Adam(
self.generator.parameters(),
lr=self.lr,
betas=self.betas,
)
opt_disc = torch.optim.Adam(
self.discriminator.parameters(),
lr=self.lr,
betas=self.betas,
)
return [opt_gen, opt_disc], []
def training_step(self, batch, batch_idx):
if self.noise_in_place: # for standart dataset
self.real_items, _ = batch
noises = torch.randn(
(self.real_items.shape[0], self.latent_dim),
dtype=torch.float32,
).to(self.device)
else:
self.real_items, noises = batch # for heandmade dataset
opt_gen, opt_disc = self.optimizers()
# ---------------------
# Train discriminator
# ---------------------
self.discriminator.zero_grad()
# 1. discriminator on real items
real_label = torch.full(
size=(self.real_items.shape[0], 1),
fill_value=self.real_label,
dtype=torch.float,
).to(self.device)
disc_label = self.discriminator(self.real_items)
loss_disc_real = self.criterion(disc_label, real_label)
loss_disc_real.backward()
# 2. discriminator on fake items
fake_label = torch.full(
size=(self.real_items.shape[0], 1),
fill_value=self.fake_label,
dtype=torch.float,
).to(self.device)
self.fake_items = self.generator(noises)
disc_label = self.discriminator(self.fake_items)
loss_disc_fake = self.criterion(disc_label, fake_label)
loss_disc_fake.backward()
# 3. discriminator optimizer step (on real and fake items)
opt_disc.step()
loss_disc = 0.5 * loss_disc_real + 0.5 * loss_disc_fake
self.log("loss/disc", loss_disc, on_epoch=False, on_step=True)
# ---------------------
# Train generator
# ---------------------
self.generator.zero_grad()
self.fake_items = self.generator(noises)
disc_label = self.discriminator(self.fake_items)
loss_gen = self.criterion(disc_label, real_label)
loss_gen.backward()
opt_gen.step()
self.log("loss/gen", loss_gen, on_epoch=False, on_step=True)
if (batch_idx + 1) % 1000 == 0:
visualization(self.logger.log_dir)
test_image(
self.fake_items.detach().cpu().numpy(),
self.real_items.detach().cpu().numpy(),
figsize=(12, 3.5),
)
def on_train_epoch_end(self):
visualization(self.logger.log_dir)
test_image(
self.fake_items.detach().cpu().numpy(),
self.real_items.detach().cpu().numpy(),
figsize=(12, 3.5),
)
Создадим модели:
set_random_seed(42)
trainset = ParabolaDS(n_batches, batch_size, latent_dim)
train_loader = DataLoader(trainset, batch_size=batch_size, shuffle=True, num_workers=2)
generator = Generator(latent_space=latent_dim, hidden_dim=50)
discriminator = Discriminator(hidden_dim=50)
pl_model = GAN(generator, discriminator)
Обучим наш GAN:
pl_model = GAN(generator, discriminator)
trainer = L.Trainer(
max_epochs=num_epochs,
logger=L.pytorch.loggers.TensorBoardLogger(save_dir="./log_gan/"),
)
trainer.fit(model=pl_model, train_dataloaders=train_loader)


INFO: `Trainer.fit` stopped: `max_epochs=1` reached. INFO:lightning.pytorch.utilities.rank_zero:`Trainer.fit` stopped: `max_epochs=1` reached.
У нас получилось сгенерировать точки, равномерно распределенные по параболе.
С помощью GAN можно генерировать не только точки на параболе, но и, например, изображения. Но появляются закономерные вопросы.
Самым простым ответом будет: взять шум, пропустить его через полносвязные слои и сделать reshape до нужного разрешения. В целом, это будет работать.
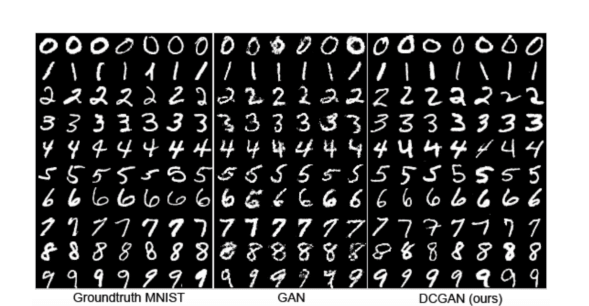
Однако DCGAN (Deep Convolutional GAN) использует сверточные и сверточно-транспонированные (convolutional и convolutional-transpose) слои в дискриминаторе и генераторе соответственно. Впервые метод DCGAN был описан в статье Unsupervised Representation Learning with Deep Convolutional Generative Adversarial Networks (Radford et al., 2015) 🎓[arxiv].
Ниже видна разница в генерации при помощи исключительно полносвязных слоёв и при помощи обратных свёрток. Видно, что результат DCGAN лучше, чем GAN.
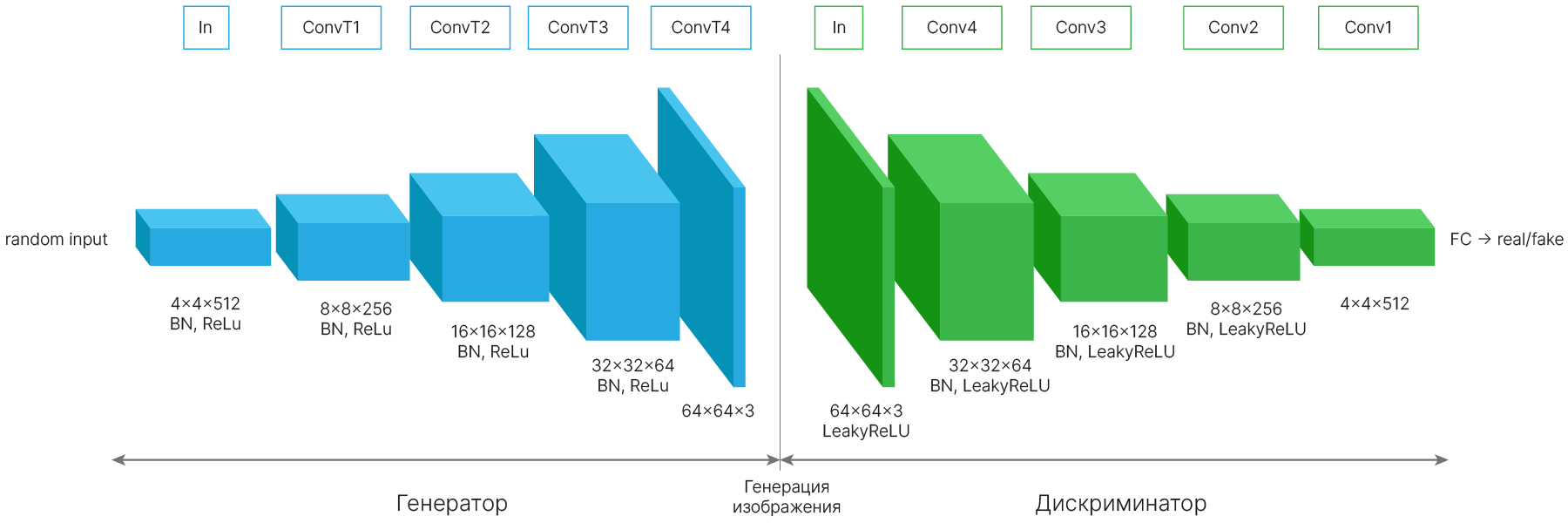
На вход генератора подают шум для создания разнообразных объектов. Этот шум представляет собой вектор в многомерном пространстве. Один вектор — один сгенерированный объект. Задача генератора — преобразовать вектор в изображение.
Такое преобразование возможно при помощи транспонированных сверточных (convolution-transpose, иногда называют fractionally strided convolution) слоев или upsample слоев с последующей сверткой.
Давайте посмотрим на пример обученного DCGAN
import torch
use_gpu = True if torch.cuda.is_available() else False
model = torch.hub.load(
"facebookresearch/pytorch_GAN_zoo:hub", "DCGAN", pretrained=True, useGPU=use_gpu
)
clear_output()
Распечатаем архитектуру генератора:
print(model.getNetG())
GNet(
(formatLayer): ConvTranspose2d(120, 512, kernel_size=(4, 4), stride=(1, 1), bias=False)
(main): Sequential(
(batchNorm0): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu0): ReLU(inplace=True)
(convTranspose1): ConvTranspose2d(512, 256, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(batchNorm1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): ReLU(inplace=True)
(convTranspose2): ConvTranspose2d(256, 128, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(batchNorm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): ReLU(inplace=True)
(convTranspose3): ConvTranspose2d(128, 64, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(batchNorm3): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu3): ReLU(inplace=True)
(outlayer): ConvTranspose2d(64, 3, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
)
)
Распечатаем архитектуру дискриминатора:
print(model.getNetD())
DNet(
(main): Sequential(
(convTranspose3): Conv2d(3, 64, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(relu3): LeakyReLU(negative_slope=0.2, inplace=True)
(convTranspose2): Conv2d(64, 128, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(batchNorm2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu2): LeakyReLU(negative_slope=0.2, inplace=True)
(convTranspose1): Conv2d(128, 256, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(batchNorm1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu1): LeakyReLU(negative_slope=0.2, inplace=True)
(convTranspose0): Conv2d(256, 512, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1), bias=False)
(batchNorm0): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu0): LeakyReLU(negative_slope=0.2, inplace=True)
)
(decisionLayer): Conv2d(512, 21, kernel_size=(4, 4), stride=(1, 1), bias=False)
)
import torchvision
num_images = 16
noise, _ = model.buildNoiseData(num_images)
with torch.no_grad():
generated_images = model.test(noise)
generated_images = (
generated_images.clamp(-1, 1) + 1
) / 2.0 # normalization to 0..1 range
fig, ax = plt.subplots(figsize=(16 * 3, 2 * 3))
ax.imshow(
torchvision.utils.make_grid(generated_images).permute(1, 2, 0).cpu().numpy(),
interpolation="nearest",
aspect="equal",
)
ax.axis("off")
plt.show()
del model

Теперь давайте попробуем сами написать свой DCGAN и обучить его на датасете FashionMNIST
num_epochs = 3 # Num of epochs
batch_size = 64 # batch size
lr = 2e-4 # Learning rate
b1 = 0.5 # Adam: decay of first order momentum of gradient
b2 = 0.999 # Adam: decay of first order momentum of gradient
latent_dim = 100 # latent space
img_size = 32 # images size
channels = 1 # Num of channels
Обычно мы инициализируем веса случайным образом, но ничто не мешает нам инициализировать их так, как мы хотим. В оригинальной статье 🎓[arxiv] про DCGAN предложено инициализировать веса нормальным распределением с центром в нуле и стандартным отклонением 0,02:
def weights_init_normal(m):
classname = m.__class__.__name__
if classname.find("Conv") != -1:
torch.nn.init.normal_(m.weight.data, 0.0, 0.02)
elif classname.find("BatchNorm2d") != -1:
torch.nn.init.normal_(m.weight.data, 1.0, 0.02)
torch.nn.init.constant_(m.bias.data, 0.0)
elif classname.find("Linear") != -1:
torch.nn.init.normal_(m.weight.data, 0.0, 0.02)
Обратите внимание, как преобразовывается шум в генераторе:
view ресэмплится до размера карты признаков на входе сверточного слоя,conv_blocks) к нему применяются ConvTranspose2d.class GeneratorBlock(nn.Module):
def __init__(self, in_channel, out_channel):
super().__init__()
self.block = nn.Sequential(
nn.ConvTranspose2d(
in_channel, out_channel, kernel_size=4, stride=2, padding=1
),
nn.BatchNorm2d(out_channel),
nn.LeakyReLU(0.2, inplace=True),
)
def forward(self, x):
return self.block(x)
class Generator(nn.Module):
def __init__(self, latent_dim, img_size, channels):
super(Generator, self).__init__()
self.init_size = img_size // 2**2
self.l1 = nn.Sequential(nn.Linear(latent_dim, 128 * self.init_size**2))
self.conv_blocks = nn.Sequential(
nn.BatchNorm2d(128),
GeneratorBlock(in_channel=128, out_channel=128),
GeneratorBlock(in_channel=128, out_channel=64),
nn.Conv2d(64, channels, 3, stride=1, padding=1),
nn.Tanh(),
)
def forward(self, z):
out = self.l1(z)
out = out.view(out.shape[0], 128, self.init_size, self.init_size)
img = self.conv_blocks(out)
return img
class DiscriminatorBlock(nn.Module):
def __init__(self, in_channel, out_channel, bn=True):
super().__init__()
block = [
nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=2, padding=1),
nn.LeakyReLU(0.2, inplace=True),
nn.Dropout2d(0.25),
]
if bn:
block.append(nn.BatchNorm2d(out_channel, 0.8))
self.block = nn.Sequential(*block)
def forward(self, x):
return self.block(x)
class Discriminator(nn.Module):
def __init__(self, channels):
super().__init__()
self.model = nn.Sequential(
DiscriminatorBlock(channels, 16, bn=False),
DiscriminatorBlock(16, 32),
DiscriminatorBlock(32, 64),
DiscriminatorBlock(64, 128),
)
# The height and width of downsampled image
ds_size = img_size // 2**4
self.adv_layer = nn.Sequential(nn.Linear(128 * ds_size**2, 1), nn.Sigmoid())
def forward(self, img):
out = self.model(img)
out = out.view(out.shape[0], -1)
validity = self.adv_layer(out)
return validity
set_random_seed(42)
L.seed_everything(42)
# Initialize Generator and Discriminator
generator = Generator(latent_dim=latent_dim, img_size=img_size, channels=channels)
discriminator = Discriminator(channels=channels)
# Initialize weight
generator.apply(weights_init_normal)
discriminator.apply(weights_init_normal)
pl_model = GAN(
generator, discriminator, noise_in_place=True, latent_dim=100, lr=lr, betas=(b1, b2)
)
INFO: Seed set to 42 INFO:lightning.fabric.utilities.seed:Seed set to 42
Напишем функцию для отображения изображений:
from torchvision.utils import make_grid
def test_image(fake_items, real_items, figsize=(5, 5)):
grid_fake = (
make_grid(torch.tensor(fake_items[:10]), nrow=10, normalize=True)
.permute(1, 2, 0)
.numpy()
)
grid_real = (
make_grid(torch.tensor(real_items[:10]), nrow=10, normalize=True)
.permute(1, 2, 0)
.numpy()
)
fig, ax = plt.subplots(2, 1, figsize=figsize)
ax[0].imshow(grid_fake)
ax[0].set_axis_off()
ax[1].imshow(grid_real)
ax[1].set_axis_off()
plt.axis("off")
plt.show()
Загрузим данные в DataLoader:
import os
from torchvision import datasets, transforms
os.makedirs("../../data/mnist", exist_ok=True)
data_loader = torch.utils.data.DataLoader(
datasets.FashionMNIST(
"../../data/mnist",
train=True,
download=True,
transform=transforms.Compose(
[
transforms.Resize(img_size),
transforms.ToTensor(),
transforms.Normalize([0.5], [0.5]),
]
),
),
batch_size=batch_size,
shuffle=True,
)
clear_output()
trainer = L.Trainer(
max_epochs=num_epochs,
logger=L.pytorch.loggers.TensorBoardLogger(save_dir="./log_cgan/"),
)
trainer.fit(model=pl_model, train_dataloaders=data_loader)


INFO: `Trainer.fit` stopped: `max_epochs=3` reached. INFO:lightning.pytorch.utilities.rank_zero:`Trainer.fit` stopped: `max_epochs=3` reached.
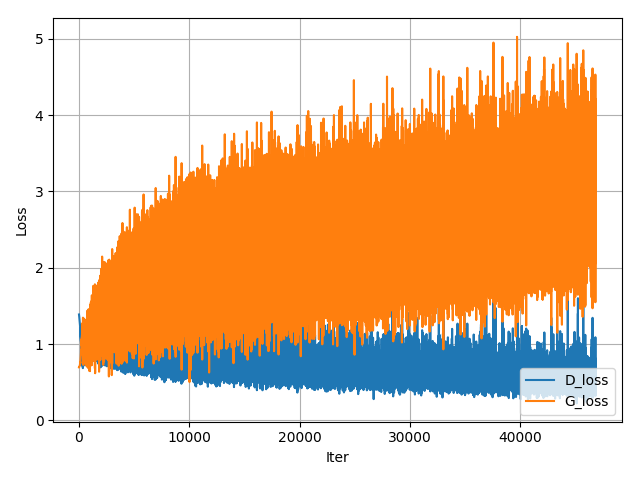
Мы проучили модель 3 эпохи. Видно, что Loss не только не сошлись, но начали расходиться. При этом на сгенерированных изображениях присутствует характерная рябь. Если увеличить количество эпох, качество генерируемых изображений улучшится, но эффект расхождения Loss только усилится.
Такая ситуация происходит чаще, чем нам бы хотелось. Ниже показаны кривые обучения простого GAN на датасете MNIST.
Одной из причин проблем со сходимостью GAN являются большие градиенты дискриминатора, которые приводят к сбою настроек генератора.
В статье Wasserstein GAN 🎓[arxiv] показано, что обеспечение плавности (k-Липшицевости 📚[wiki]) изменения параметров дискриминатора улучшает сходимость GAN. Есть несколько подходов к обеспечению такой плавности. Ниже приведем некоторые из них.
Изменение Loss:
Top-k Training: отказ от обучения на плохих примерах. Градиент пропускается только через top-k наилучшим способом сгенерированных объектов. Объекты с большими градиентами отбрасываются. Cтатья 🎓[arxiv].
Ни один из этих методов не является универсальным. Мы попробуем применить к нашей модели спектральную нормализацию:
from torch.nn.utils import spectral_norm
def add_spectral_norm(m):
if isinstance(m, nn.Linear) or isinstance(m, torch.nn.Conv2d):
m = spectral_norm(m)
set_random_seed(42)
L.seed_everything(42)
# Initialize Generator and Discriminator
generator = Generator(latent_dim=latent_dim, img_size=img_size, channels=channels)
discriminator = Discriminator(channels=channels)
# Initialize weight
generator.apply(weights_init_normal)
discriminator.apply(weights_init_normal)
discriminator.apply(add_spectral_norm)
pl_model = GAN(
generator, discriminator, noise_in_place=True, latent_dim=100, lr=lr, betas=(b1, b2)
)
INFO: Seed set to 42 INFO:lightning.fabric.utilities.seed:Seed set to 42
trainer = L.Trainer(
max_epochs=num_epochs,
logger=L.pytorch.loggers.TensorBoardLogger(save_dir="./log_cgan/"),
)
trainer.fit(model=pl_model, train_dataloaders=data_loader)


INFO: `Trainer.fit` stopped: `max_epochs=3` reached. INFO:lightning.pytorch.utilities.rank_zero:`Trainer.fit` stopped: `max_epochs=3` reached.
График функции потерь меняется более устойчиво. Нет ряби на изображениях. При увеличении количества эпох качество станет еще лучше.
Простые ошибки:
BatchNorm следите, чтобы real и fake батчи поступали на дискриминатор отдельно 🐾[git]. При небольшом количестве объектов в батче или странном поведении модели в тестовом режиме лучше использовать InstanceNorm.Нужно ли давать преимущество дискриминатору?
Один из самых старых и распространенных советов при обучении GAN — давать преимущество дискриминатору. В большинстве случаев эту проблему может помочь решить ограничение градиентов.
Оптимизатор:
В большинстве статей про GAN используется ADAM. В статье 🎓[arxiv] проведено исследование по поиску оптимальных параметров оптимизатора: для большинства архитектур $\beta_1 = 0.5, \beta_2 = 0.999, \text{lr} = 2\cdot 10^{-4}$ — хорошая отправная точка для обучения.
Параметр epsilon ADAM по умолчанию в PyTorch равен 1e-8, что может вызвать проблемы после длительного периода обучения, например, значения функции потерь периодически взрываются или увеличиваются. Для борьбы с этим, параметр epsilon можно увеличить, например, до 1e-3. Подробнее об этом на StackOverflow ✏️[blog] и в комментарии на Reddit ✏️[blog].
Для того, чтобы улучшить генерацию, нам нужно понять, что значит лучше. Для этого нам нужно определиться с метриками. Одной из проблем генерации является mode-collapsing — ситуация, когда модель выдает одно и то же изображение или один и тот же класс и т.д., независимо от того, какие входные данные ей подаются.
Ниже представлен пример с данными, представляющими собой 8 кластеров из гауссовых распределений. Верхняя строка — успешное обучение, нижняя — mode-collapsing.
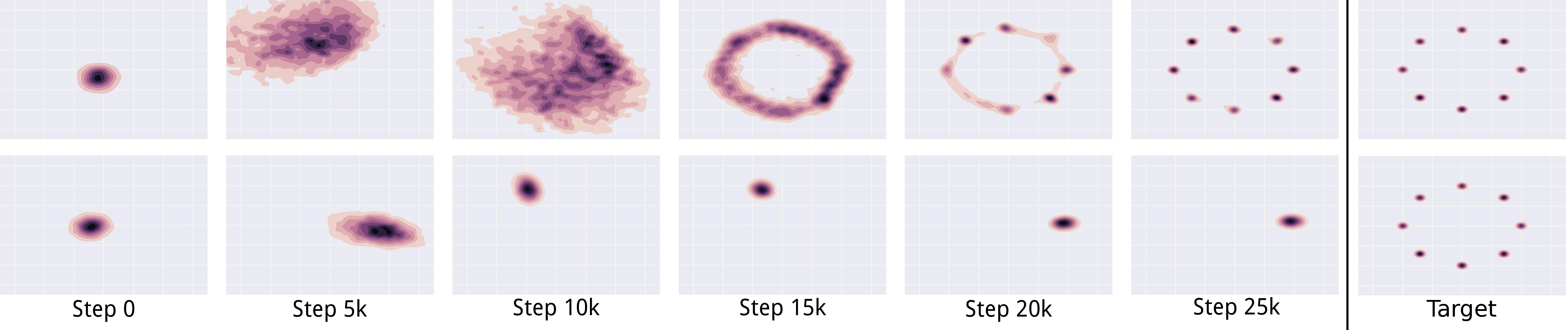
Посмотрим на это с точки зрения распределений:
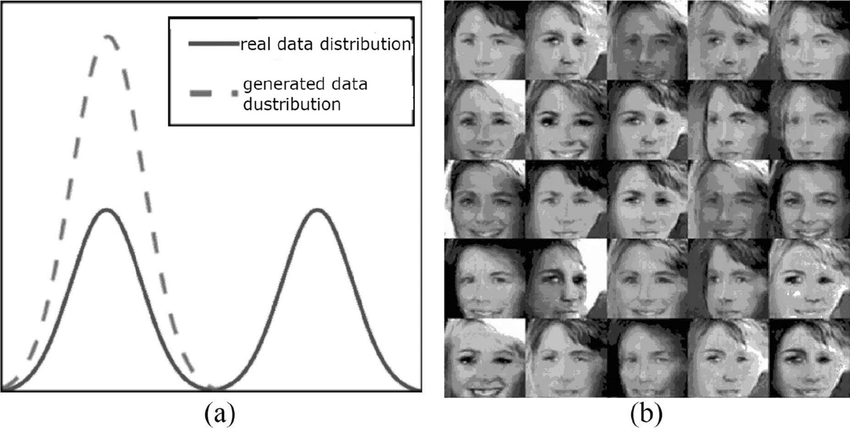
С точки зрения распределений mode-collapsing случается, когда модель повторяет только часть сложного распределения целевых данных.
Для определения качества генерации мы бы хотели оценивать два свойства сгенерированной коллекции изображений:
Один из способов проверить оба свойства — использовать Inception Score. Inception Score — это способ оценки качества генерации с использованием сети Inception-v3, обученной на ImageNet (1000 классов), предложенный в статье Improved Techniques for Training GANs 🎓[arxiv] в 2016 году.
Оцениваемые изображения прогоняются через сеть Inception-v3. На выходе сети — вероятности для 1000 классов $p(y|x)$, где $x$ — входное изображение, $y$ — метка класса.
Эти два условия могут быть объединены ✏️[blog] через дивергенцию Кульбака-Лейблера 📚[wiki] в Inception Score:
$$IS = \exp(\mathbb{E}_xKL(p(y|x)||p(y)))$$Минимальное значение $IS$ — 1, максимальное (для Inception-v3, обученной на ImageNet) — 1000. Чем выше качество генерации и больше вариативность, тем выше Inception Score.
Проблемы Inception Score:
Более поздней модификацией 🎓[arxiv] Inception Score является Frechet inception distance. Эта метрика использует расстояние Фреше 📚[wiki] (метрика сходства кривых) для оценки разницы между распределением высокоуровневых признаков, извлекаемых Inception-v3 для реальных и сгенерированных изображений. Т.к. FID использует метрику расстояния, чем меньше FID — тем лучше.
Эта метрика меньше привязана к ImageNet, т.к. рассматривает распределение высокоуровневых признаков, а не предсказываемых классов, но также зависит от версии библиотек.
Кроме того, у нее есть особенность: если вместо того, чтобы научиться генерировать новые изображения, модель выучит все изображения из train-овой выборки, значение FID будет очень низким, а если сравнивать с train данными — нулевым, поэтому важно сравнивать с отложенной выборкой (о чем иногда забывают).
Метрики попробуем посчитать для предобученного на CIFAR-10 GAN 🐾[git]. Для этого клонируем код из репозитория.
!git clone -q https://github.com/csinva/gan-vae-pretrained-pytorch.git
Создадим модель (нам нужен только генератор).
import sys
sys.path.append("/content/gan-vae-pretrained-pytorch")
from cifar10_dcgan.dcgan import Generator
generator = Generator(ngpu=1)
Подгрузим веса модели:
import torch
generator.load_state_dict(
torch.load(
"/content/gan-vae-pretrained-pytorch/cifar10_dcgan/weights/netG_epoch_199.pth",
map_location=torch.device("cpu"),
)
)
<All keys matched successfully>
Попробуем сгенерировать данные. Для этого пропишем денормализацию: автор кода использовал mean=(0.5, 0.5, 0.5) и std=(0.5, 0.5, 0.5) (не лучший выбор для CIFAR-10).
import torchvision.transforms as transforms
batch_size = 16
nz = 100
denormalization = transforms.Compose(
[
transforms.Normalize(mean=[0.0, 0.0, 0.0], std=[1 / 0.5, 1 / 0.5, 1 / 0.5]),
transforms.Normalize(mean=[-0.5, -0.5, -0.5], std=[1.0, 1.0, 1.0]),
]
)
noise = torch.randn(batch_size, nz, 1, 1)
imgs = denormalization(generator(noise))
imgs = (imgs * 255).type(torch.uint8)
Посмотрим на результат генерации:
import torchvision
import matplotlib.pyplot as plt
fig, ax = plt.subplots(figsize=(16 * 3, 2 * 3))
ax.imshow(
torchvision.utils.make_grid(imgs).permute(1, 2, 0).cpu().numpy(),
interpolation="nearest",
aspect="equal",
)
ax.axis("off")
plt.show()

Загрузим тестовый датасет от CIFAR-10:
from torchvision import datasets
test_dataset = datasets.CIFAR10(
"content", train=False, download=True, transform=transforms.ToTensor()
)
test_loader = torch.utils.data.DataLoader(
test_dataset, batch_size=32, shuffle=False, drop_last=False, num_workers=2
)
Downloading https://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz to content/cifar-10-python.tar.gz
100%|██████████| 170498071/170498071 [00:01<00:00, 99994146.95it/s]
Extracting content/cifar-10-python.tar.gz to content
Для расчета будем использовать метрики из torchmetrics, для корректной работы нужно сначала установить torchmetrics[image], а потом lightning:
from IPython.display import clear_output
!pip install -q --upgrade diffusers transformers accelerate
!pip install -q torchmetrics[image]
!pip install -q lightning
clear_output()
При работе с метриками генерации из torchmetrics есть ряд особенностей:
InceptionScore и FrechetInceptionDistance работают с трехканальными изображениями [batch, 3, 299, 299] типа torch.uint8. Изменение размера метрика делает автоматически, а количество каналов и тип данных — наша забота.feature позволяет выбирать, из какой части модели берутся признаки. Вместо чисел туда можно передавать собственный экстрактор признаков типа nn.Module.L.LightningModule с включенной GPU, тогда вычисления происходят быстрее.import lightning as L
from torchmetrics import MetricCollection
from torchmetrics.image.inception import InceptionScore
from torchmetrics.image.fid import FrechetInceptionDistance
class RunMetric(L.LightningModule):
def __init__(self, generator, noise_gen, detransform):
super().__init__()
# model
self.generator = generator
self.noise_gen = noise_gen
self.detransform = detransform
# metrics
self.is_real = InceptionScore()
self.is_fake = InceptionScore()
self.fid = MetricCollection(
{
"FIR_64": FrechetInceptionDistance(feature=64),
"FIR_192": FrechetInceptionDistance(feature=192),
"FIR_768": FrechetInceptionDistance(feature=768),
"FIR_2048": FrechetInceptionDistance(feature=2048),
}
)
def test_step(self, batch, batch_idx):
real, _ = batch
batch_size = real.shape[0]
noise = self.noise_gen(batch_size).to(self.device)
fake = self.generator(noise)
fake = self.detransform(fake)
real = (real * 255).type(torch.uint8)
fake = (fake * 255).type(torch.uint8)
self.fake = fake
self.is_real.update(real)
self.is_fake.update(fake)
self.fid.update(real, real=True)
self.fid.update(fake, real=False)
def on_test_epoch_end(self):
is_real = self.is_real.compute()[0]
self.log("IS_real", is_real.item())
self.is_real.reset()
is_fake = self.is_fake.compute()[0]
self.log("IS_fake", is_fake.item())
self.is_fake.reset()
fid = self.fid.compute()
self.log_dict(fid)
self.fid.reset()
fig, ax = plt.subplots(figsize=(16 * 3, 2 * 3))
ax.imshow(
torchvision.utils.make_grid(self.fake).permute(1, 2, 0).cpu().numpy(),
interpolation="nearest",
aspect="equal",
)
ax.axis("off")
plt.show()
def noise_gen(batch_size, nz=100):
return torch.randn(batch_size, nz, 1, 1)
!mkdir /content/lightning_logs
L.seed_everything(42)
pl_model = RunMetric(generator, noise_gen, denormalization)
clear_output()
trainer = L.Trainer(max_epochs=0)
metrics = trainer.test(model=pl_model, dataloaders=test_loader)
INFO: GPU available: True (cuda), used: True INFO:lightning.pytorch.utilities.rank_zero:GPU available: True (cuda), used: True INFO: TPU available: False, using: 0 TPU cores INFO:lightning.pytorch.utilities.rank_zero:TPU available: False, using: 0 TPU cores INFO: IPU available: False, using: 0 IPUs INFO:lightning.pytorch.utilities.rank_zero:IPU available: False, using: 0 IPUs INFO: HPU available: False, using: 0 HPUs INFO:lightning.pytorch.utilities.rank_zero:HPU available: False, using: 0 HPUs INFO: LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0] INFO:lightning.pytorch.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
Testing: | | 0/? [00:00<?, ?it/s]

┏━━━━━━━━━━━━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━━━━━━━━━━━━┓ ┃ Test metric ┃ DataLoader 0 ┃ ┡━━━━━━━━━━━━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━━━━━━━━━━━━┩ │ FIR_192 │ 1.667789101600647 │ │ FIR_2048 │ 38.301513671875 │ │ FIR_64 │ 0.2528167963027954 │ │ FIR_768 │ 0.2797166407108307 │ │ IS_fake │ 6.492331027984619 │ │ IS_real │ 10.979336738586426 │ └───────────────────────────┴───────────────────────────┘
Значение IS для тестовых данных CIFAR-10 около 11, для сгенерированных данных — 6.5. Это значит, что качеству генерации есть куда расти (по сгенерированным изображениям это видно), что касается FIR — чтобы сравнить модели, нужно обучить несколько. Чем меньше FIR, тем лучше.
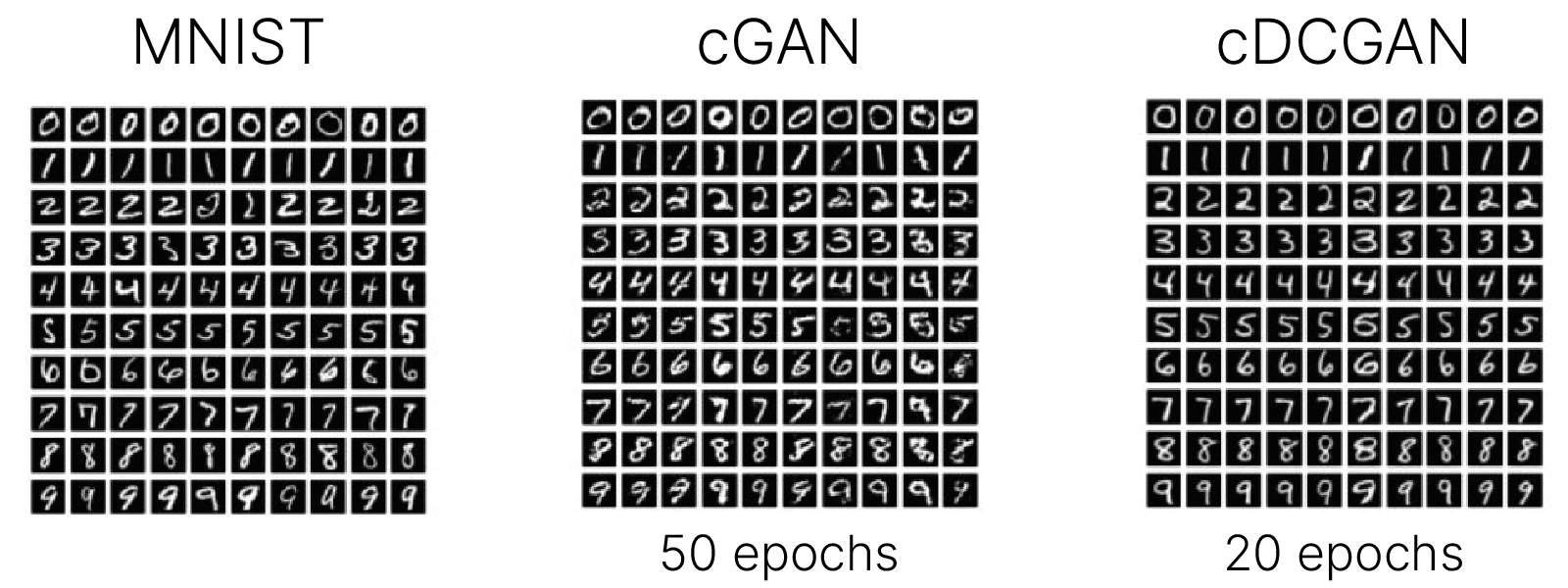
cGAN расшифровывается как Conditional Generative Adversarial Network — это GAN с условием. Условие может быть любым, например, генерация конкретной цифры. В этом случае нам нужен уже размеченный датасет для того, чтобы обучить Conditional GAN.

Обучение в данном случае будет аналогичным обучению GAN: мы будем обучать сети, чередуя реальные данные и сгенерированные, добавив label.
Поскольку подавать в сеть числа от 0 до 9 (в случае MNIST) нет смысла, нужно придумать, как подавать их в нейронную сеть. На помощь приходят Embeddings. Мы можем представить каждую метку в виде вектора с десятью элементами.
[doc] 🛠️ nn.Embedding
samples, labels = next(iter(data_loader))
label_emb = nn.Embedding(10, 10)
e = label_emb(labels)
print(f"Label: {labels[0]}")
print(f"Embedding for this label: {e[0]}")
Label: 3
Embedding for this label: tensor([-0.2315, -0.1840, -0.8128, 1.1015, 0.4965, -0.0535, -1.3618, -0.4635,
1.2901, 0.1831], grad_fn=<SelectBackward0>)
После этого эмбеддинги меток обычно конкатенируются с входами сетей.
Почему нельзя подать просто число?
Если мы будем подавать просто число, например, 0.1 для единицы и 0.5 для пяти, то вход у нас будет непрерывным, что довольно нелогично: тогда при небольшом изменении входа мы будем генерировать другую цифру. А также сети будет сложнее выучить небольшие расхождения в этом небольшом интервале. В случае с векторным представлением мы избегаем этих проблем.
Существует множество способов модификации GAN. Например, можно подмешивать метки классов только в дискриминатор, как сделано в Semi-Supervised GAN 🎓[arxiv]. В нем дискриминатор делает классификацию не на $2$ класса [real, fake], а на $n+1$ класс [real 1, real 2, …, real n, fake], где $n$ — количество классов в исходном датасете.
Другие модификации и пример кода с ними:
Также стоит отметить добавление модификаций исходного латентного пространства — Style GAN. Именно они позволили генерировать фотореалистичные изображения с минимальным количеством артефактов. Примеры изображений ✏️[blog].
Статьи про модификации GAN'ов:
Базовая публикация по теме: Denoising Diffusion Probabilistic Models (Ho et al., 2020) 🎓[arxiv].
В GAN мы преобразовывали шум в целевой объект в один шаг с использованием сложной функции — генератора, и задача обучения GAN состояла в обучении этой функции.
Идея диффузии состоит в том, чтобы делать это не за один шаг, а за много маленьких шагов.
Пусть мы имеем некоторый объект $\mathbf{x}_0$ из заданного имеющимся датасетом распределения $\mathbf{x}_0 \sim q(\mathbf{x})$. Определим так называемый прямой диффузионный процесс, в ходе которого мы будем последовательно добавлять небольшое количество Гауссового шума последовательно $T$ раз, создавая из нашего объекта последовательность $\mathbf{x}_1, \dots, \mathbf{x}_T$ постепенно всё более зашумленных версий нашего исходного объекта:
$$\large \mathbf{x_t} = \sqrt{1-\beta_t}\mathbf{x_{t-1}}+\sqrt{\beta_t}\mathbf{n_{t-1}},$$где $\mathbf{n_{t-1}} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})$, а $\beta_t$ — дисперсия добавляемого на $t$-ом шаге шума.
Параметры добавляемого шума зависят от номера шага зашумления. Набор $\{\beta_t \in (0, 1)\}_{t=1}^T$ именуется планировщиком зашумления и задается заранее. В конце зашумления получаем нормальный шум: $\mathbf{x_T} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})$.
Посмотрим, как это будет выглядеть на различных изображениях:
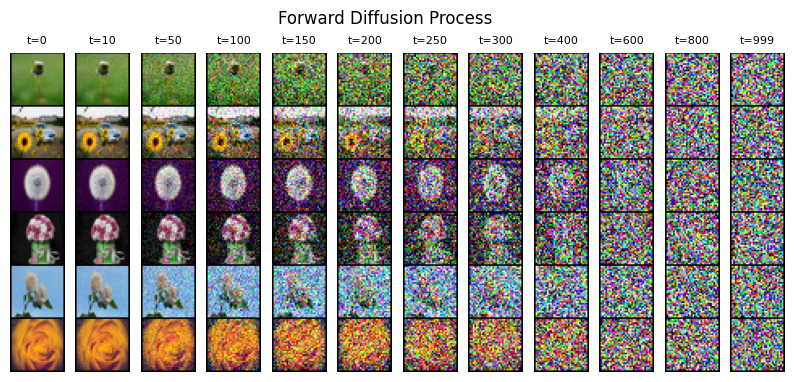
Исходное распределение данных из датасета будет последовательно преобразовано в Гауссов шум:
$$ \large q(\mathbf{x}_{1:T} \vert \mathbf{x}_0) = \prod^T_{t=1} q(\mathbf{x}_t \vert \mathbf{x}_{t-1})$$$$\large q(\mathbf{x}_t \vert \mathbf{x}_{t-1}) = \mathcal{N}(\mathbf{x}_t; \sqrt{1 - \beta_t} \mathbf{x}_{t-1}, \beta_t\mathbf{I}) \quad$$Важным свойством Гауссова распределения является то, что оно допускает аналитическое вычисление шума на любом из шагов процесса в явном виде. Это связано с тем, что сумма нескольких нормально распределенных случайных величин также является случайной величиной с нормальным распределением. Это значит, что во время обучения модели для подготовки данных нам не нужно будет делать до $T$ шагов зашумления. Мы сможем зашумить изображение за один шаг.
Рассчитаем параметры зашумления для $T$ шагов.
Введём обозначение из оригинальной статьи $\alpha_t = 1 - \beta_t$. Тогда:
$$ \large \mathbf{x}_t= \sqrt{\alpha_t}\mathbf{x}_{t-1} + \sqrt{1 - \alpha_t}\mathbf{n}_{t-1},$$где $\mathbf{n_{t-1}} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})$.
Когда мы складываем две нормально распределенные величины с разной дисперсией и нулевым средним $\mathcal{N}(\mathbf{0}, \sigma_1^2\mathbf{I})$ и $\mathcal{N}(\mathbf{0}, \sigma_2^2\mathbf{I})$, то получаем новую нормально распределенную случайную величину $\mathcal{N}(\mathbf{0}, (\sigma_1^2 + \sigma_2^2)\mathbf{I})$, что в нашей параметризации означает:
$$\sqrt{(1 - \alpha_t) + \alpha_t (1-\alpha_{t-1})} = \sqrt{1 - \alpha_t\alpha_{t-1}}.$$Применим к $\mathbf{x}_t$: $$ \large \mathbf{x}_t = \sqrt{\alpha_t \alpha_{t-1}} \mathbf{x}_{t-2} + \sqrt{1 - \alpha_t \alpha_{t-1}} \bar{\mathbf{n}}_{t-2}, $$
где $\bar{\mathbf{n}}_{t-2} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})$.
Продолжим разворачивать, пока не дойдем до $\mathbf{x}_0$:
$$ \large \mathbf{x}_t = \sqrt{\overline{\alpha}_t}\mathbf{x}_0 + \sqrt{1 - \overline{\alpha}_t}\bar{\mathbf{n}}_{0}, $$где $\bar{\alpha}_t = \prod_{i=1}^t \alpha_i$, а $\bar{\mathbf{n}}_{0} \sim \mathcal{N}(\mathbf{0}, \mathbf{I})$.
Мы получили правило зашумления картинки на $t$-ом шаге.
На практике можно использовать другие методы зашумления/деградации изображения, которые больше подходят под ваши данные.

В оригинальной статье 🎓[arxiv] используется линейный планировщик зашумления:
import locale
locale.getpreferredencoding = lambda: "UTF-8"
!pip install -q --upgrade transformers accelerate
import torch
def linear_beta_schedule(timesteps):
beta_start = 1e-4
beta_end = 0.02
return torch.linspace(beta_start, beta_end, timesteps)
Посмотрим, как меняются $β$ и $\overline{\alpha}_t$:
import matplotlib.pyplot as plt
T = 1000
beta_linear = linear_beta_schedule(T)
alpha_linear = 1.0 - beta_linear
# \hat{\alpha}_{i-1} = \prod_{j=0}^{i-1} \alpha_j
alpha_hat_linear = torch.cumprod(alpha_linear, dim=0)
fig, axs = plt.subplots(1, 2, figsize=(10, 3))
axs[0].plot(beta_linear, label="linear")
axs[0].set_xlabel("t")
axs[0].set_ylabel("beta")
axs[0].legend()
axs[1].plot(alpha_hat_linear, label="linear")
axs[1].set_xlabel("t")
axs[1].set_ylabel("alpha_hat")
axs[1].legend()
plt.show()

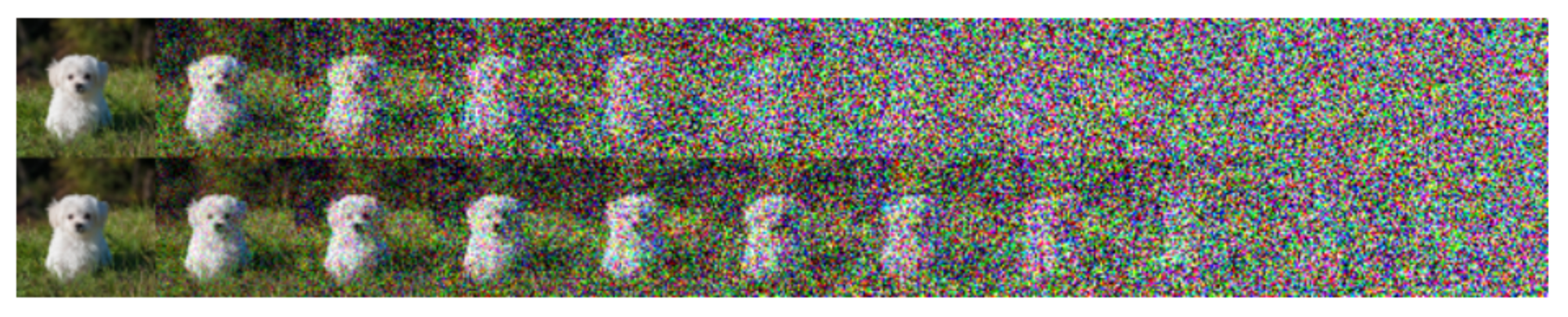
$\overline{\alpha}_t$ меняется сильно нелинейно. В более поздней статье 🎓[arxiv] предложен косинусный планировщик скорости обучения:
def cosine_beta_schedule(timesteps, s=0.008):
"""
cosine schedule as proposed in https://arxiv.org/abs/2102.09672
"""
steps = timesteps + 1
x = torch.linspace(0, timesteps, steps)
alphas_cumprod = torch.cos(((x / timesteps) + s) / (1 + s) * torch.pi * 0.5) ** 2
alphas_cumprod = alphas_cumprod / alphas_cumprod[0]
betas = 1 - (alphas_cumprod[1:] / alphas_cumprod[:-1])
return torch.clip(betas, 0.0001, 0.9999)
T = 1000
beta_cosine = cosine_beta_schedule(T)
alpha_cosine = 1.0 - beta_cosine
# \hat{\alpha}_{i-1} = \prod_{j=0}^{i-1} \alpha_j
alpha_hat_cosine = torch.cumprod(alpha_cosine, dim=0)
fig, axs = plt.subplots(1, 2, figsize=(10, 3))
axs[0].plot(beta_linear, label="linear")
axs[0].plot(beta_cosine, label="cosine")
axs[0].set_xlabel("t")
axs[0].set_ylabel("beta")
axs[0].legend()
axs[1].plot(alpha_hat_linear, label="linear")
axs[1].plot(alpha_hat_cosine, label="cosine")
axs[1].set_xlabel("t")
axs[1].set_ylabel("alpha_hat")
axs[1].legend()
plt.show()

Изменение $\overline{\alpha}_t$ для косинусного планировщика более линейно. В статье 🎓[arxiv] показано, что такая форма минимизирует Negative Log-Likelihood, что приводит к улучшению качества изображения. Визуально зашумление изображения с использованием косинусного планировщика кажется более равномерным:
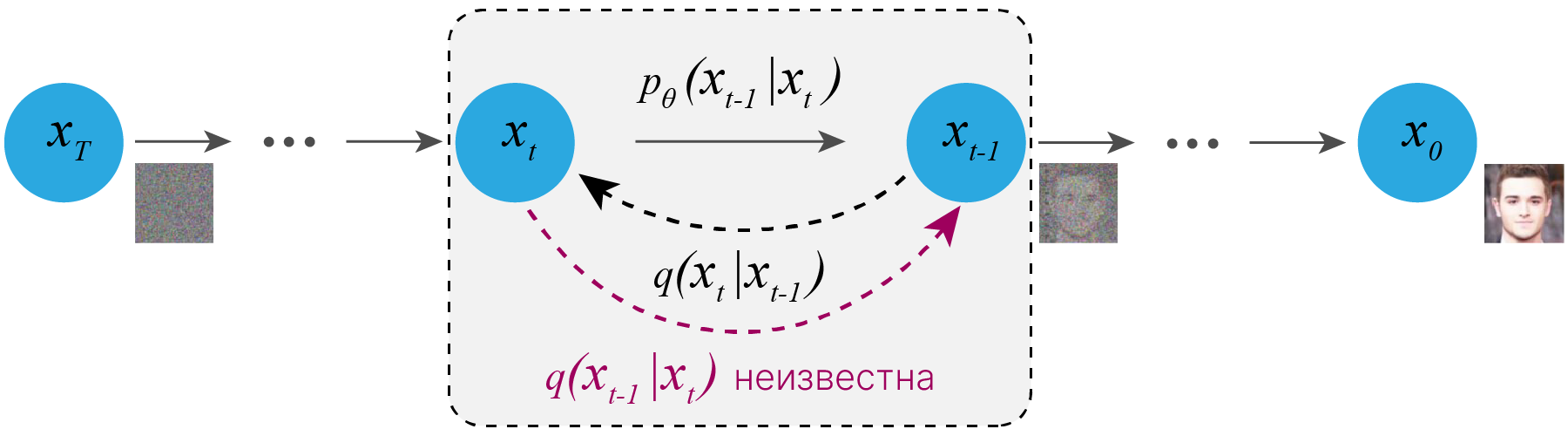
Целью обратного диффузионного процесса является “расшумление” изображения. Для осуществления данного процесса используется нейросеть, об архитектуре которой мы поговорим позже. Пока нам нужно определиться с входом и выходом сети и функцией ошибок:
Подробное математическое обоснование:
Теперь обсудим, как будет происходить генерация изображения. Последовательность генерации представлена на рисунке ниже:
Идейно это очень похоже на процесс рисования: мы грубо рисуем контуры, частично их стираем и уточняем.

Архитектура Denoising U-Net представлена на картинке ниже. Это уже знакомый нам из лекции по сегментации U-Net с привычными skip connection между картами признаков энкодера и декодера (рыжие стрелки и надпись concatenate). На входе сети — зашумленное изображение, на выходе — предсказанный шум.
В качестве базового блока используются ResNet блоки. Из архитектурных добавлений:
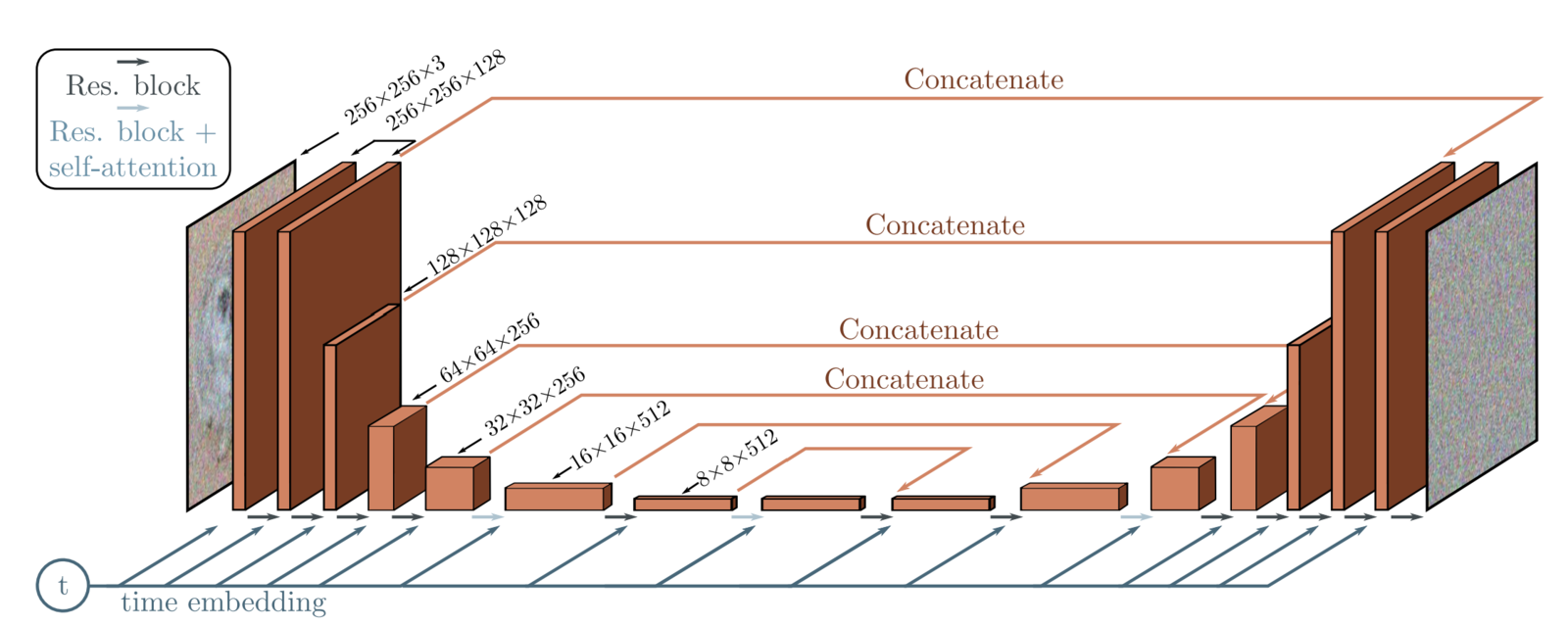
В качестве базового блока используются ResNet блоки с GELU в качестве функции активации и GroupNorm.

import torch.nn as nn
import torch.nn.functional as F
class ResNetBlock(nn.Module):
def __init__(self, in_features, out_features, mid_features=None, residual=False):
super().__init__()
self.residual = residual
if not mid_features:
mid_features = out_features
self.conv_stack = nn.Sequential(
nn.Conv2d(in_features, mid_features, kernel_size=3, padding=1, bias=False),
nn.GroupNorm(1, mid_features),
nn.GELU(),
nn.Conv2d(mid_features, out_features, kernel_size=3, padding=1, bias=False),
nn.GroupNorm(1, out_features),
)
def forward(self, x):
if self.residual:
return F.gelu(x + self.conv_stack(x))
else:
return self.conv_stack(x)
При повышении и понижении размерности к картам признаков примешивается информация о текущем шаге зашумления/расшумления. Это делается через “аппендикс” c линейным слоем, который изменяет размер эмбеддинга до количества каналов карты признаков $C_{out}$ и суммирует эмбеддинг с каналами.
Понижение размерности:
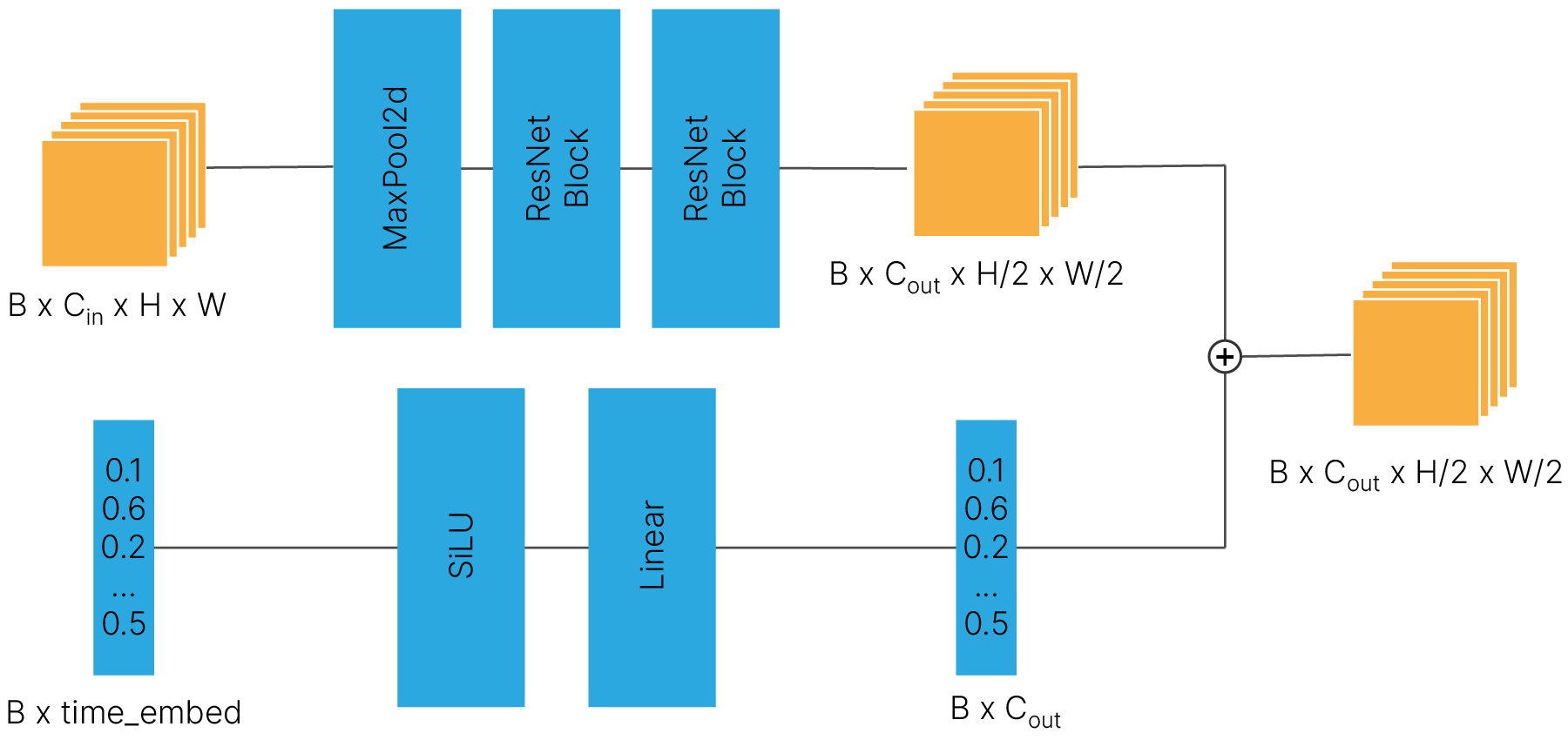
Повышение размерности — не забываем конкатенировать признаки с кодера:

class ResizeBlock(nn.Module):
def __init__(self, in_features, out_features, emb_dim):
super().__init__()
# defines non-linear map from time embedding features to conv features
self.emb_projection = nn.Sequential(
nn.SiLU(),
nn.Linear(emb_dim, out_features),
)
def add_emb(self, x, t_vector):
# [batch_size, time_embedding_dim] -> [batch_size, out_features]
emb = self.emb_projection(t_vector)
# [batch_size, out_features] - > [batch_size, out_features, H, W]
emb = emb[:, :, None, None].repeat(1, 1, x.shape[-2], x.shape[-1])
return x + emb
def forward(self, x):
pass
class Down(ResizeBlock):
def __init__(self, in_features, out_features, emb_dim=256):
super().__init__(in_features, out_features, emb_dim)
self.maxpool_conv = nn.Sequential(
nn.MaxPool2d(2),
ResNetBlock(in_features, in_features, residual=True),
ResNetBlock(in_features, out_features),
)
def forward(self, x, t):
x = self.maxpool_conv(x)
x = self.add_emb(x, t)
return x
class Up(ResizeBlock):
def __init__(self, in_features, out_features, emb_dim=256):
super().__init__(in_features, out_features, emb_dim)
self.up = nn.Upsample(scale_factor=2, mode="bilinear", align_corners=True)
self.conv = nn.Sequential(
ResNetBlock(in_features, in_features, residual=True),
ResNetBlock(in_features, out_features, in_features // 2),
)
def forward(self, x, skip_x, t):
x = self.up(x)
x = torch.cat([skip_x, x], dim=1)
x = self.conv(x)
x = self.add_emb(x, t)
return x
Стоит обратить внимание на то, что блок self-attention применяется к изображению попиксельно. Именно для этого карты признаков с размерами H×W вытягиваются в вектора HW. Это связано с тем, что пиксели шума, добавляемого к изображению, не коррелированны. Self-attention — самая вычислительно тяжелая часть модели.
class SelfAttention(nn.Module):
def __init__(self, channels, size):
super().__init__()
self.channels = channels
self.size = size
self.mha = nn.MultiheadAttention(channels, num_heads=4, batch_first=True)
self.ln = nn.LayerNorm([channels])
self.mlp = nn.Sequential(
nn.LayerNorm([channels]),
nn.Linear(channels, channels),
nn.GELU(),
nn.Linear(channels, channels),
)
def forward(self, x):
# [batch_size, C, H, W] -> [batch_size, H*W, C]
x = x.view(-1, self.channels, self.size * self.size).swapaxes(1, 2)
x_ln = self.ln(x)
# K, Q, V in Self attention are equal
attention_value, _ = self.mha(x_ln, x_ln, x_ln)
# skip connection
attention_value = attention_value + x
# simple multilayer perceptron and second skip connection
attention_value = self.mlp(attention_value) + attention_value
# back to [batch_size, C, H, W]
return attention_value.swapaxes(2, 1).view(
-1, self.channels, self.size, self.size
)
Соберем модель. У нас будут небольшие изображения 64×64, поэтому будет всего 3 понижения/повышения размерности:
class UNet(nn.Module):
r"""
Denoising U-Net model implementation based on arXiv:2006.11239 [cs.LG]
"""
def __init__(self, num_channels=3, img_size=64, time_enbed_dim=256):
super().__init__()
self.num_channels = num_channels
self.time_dim = time_enbed_dim
self.img_size = img_size
# Downsample and enlarge feature dim
self.inc = ResNetBlock(num_channels, 64)
self.down1 = Down(64, 128)
self.sa1 = SelfAttention(128, img_size // 2)
self.down2 = Down(128, 256)
self.sa2 = SelfAttention(256, img_size // 4)
self.down3 = Down(256, 256)
self.sa3 = SelfAttention(256, img_size // 8)
# Keep spatial dim constant
self.conv_bottleneck = nn.Sequential(
ResNetBlock(256, 512),
SelfAttention(512, img_size // 8),
ResNetBlock(512, 256),
)
# Upsample and reduce feature dim
# 512=256+256 from conv_bottleneck and sa3
self.up1 = Up(512, 128)
self.sa4 = SelfAttention(128, img_size // 4)
# 256=128+128 from sa4 and sa2
self.up2 = Up(256, 64)
self.sa5 = SelfAttention(64, img_size // 2)
# 128=64+64 from sa5 and sa1
self.up3 = Up(128, 64)
self.sa6 = SelfAttention(64, img_size)
self.outc = nn.Conv2d(64, num_channels, kernel_size=1)
def pos_encoding(self, t):
r"""
Returns embedding vector for given integer time index.
We adopt 1d Positional Encoding form arXiv:1706.03762 [cs.CL]
see 3.5 for more details.
PE(x,2i) = sin(x/10000^(2i/D))
PE(x,2i+1) = cos(x/10000^(2i/D))
Where:
x is a point in 1d space
i is an integer in [0, D/2), where D is the size of the feature dimension
Args:
t: Tensor, shape ``[batch_size, 1]``
Returns:
pe: Tensor, shape ``[batch_size, time_embedding_dim]``
"""
# placeholder for diffusion time encoding vector
pe = torch.zeros(t.shape[0], self.time_dim).to(t.device)
# factor 1/10000^(2i/D)
div_factors = torch.exp(
torch.arange(0, self.time_dim, 2)
* (-torch.log(torch.as_tensor(10000.0)) / self.time_dim)
).to(t.device)
pe[:, 0::2] = torch.sin(t * div_factors)
pe[:, 1::2] = torch.cos(t * div_factors)
return pe
def forward(self, x, t):
t = t.unsqueeze(-1).type(torch.float).to(x)
t = self.pos_encoding(t)
x1 = self.inc(x)
x2 = self.down1(x1, t)
x2 = self.sa1(x2)
x3 = self.down2(x2, t)
x3 = self.sa2(x3)
x4 = self.down3(x3, t)
x4 = self.sa3(x4)
x4 = self.conv_bottleneck(x4)
x = self.up1(x4, x3, t)
x = self.sa4(x)
x = self.up2(x, x2, t)
x = self.sa5(x)
x = self.up3(x, x1, t)
x = self.sa6(x)
output = self.outc(x)
return output
В качестве позиционного эмбеддинга используется sin-cos позиционный эмбеддинг из трансформеров.
num_noise_steps = 1000
time_enbed_dim = 256
model = UNet()
t = torch.arange(start=1, end=1001, step=1).unsqueeze(1)
positional_embeding = model.pos_encoding(t)
embeding_img = positional_embeding.numpy()
cax = plt.matshow(embeding_img[0:100])
plt.gcf().colorbar(cax)
plt.show()

Ниже представлен код для обучения и генерации диффузионной модели. Модель использует линейный планировщик скорости.
!pip install -q lightning
import lightning as L
from PIL import Image
from pathlib import Path
from tqdm.notebook import tqdm
from torch.optim import AdamW
from torchvision.utils import make_grid
L.seed_everything(42)
class DiffusionGenerativeModel(L.LightningModule):
def __init__(
self,
model,
path,
num_noise_steps=1000,
beta_start=1e-4,
beta_end=0.02,
img_size=64,
lr=0.001,
save_images=True,
save_progress=True,
):
super().__init__()
self.model = model
self.path = Path(path)
self.num_noise_steps = num_noise_steps
self.beta_start = beta_start
self.beta_end = beta_end
self.img_size = img_size
self.lr = lr
self.save_images = save_images
self.save_progress = save_progress
# diffusion process linear noise schedule
self.beta = self._get_noise_schedule()
self.alpha = 1.0 - self.beta
# \hat{\alpha}_{i-1} = \prod_{j=0}^{i-1} \alpha_j
self.alpha_hat = torch.cumprod(self.alpha, dim=0)
# init optimizer and loss for training
self.criterion = nn.MSELoss()
def configure_optimizers(self):
optimizer = AdamW(self.model.parameters(), lr=self.lr)
return optimizer
def _get_noise_schedule(self):
return torch.linspace(self.beta_start, self.beta_end, self.num_noise_steps)
def _noise_images_batch(self, x, t):
# \mu_i = \sqrt{\hat{\alpha}_i}
mu = torch.sqrt(self.alpha_hat[t])[:, None, None, None].to(self.device)
# \sigma_i = \sqrt{1 - \hat{\alpha}_i}
sigma = torch.sqrt(1 - self.alpha_hat[t])[:, None, None, None].to(self.device)
standard_normal_noise = torch.randn_like(x).to(self.device)
noised_image_batch = mu * x + sigma * standard_normal_noise
return noised_image_batch, standard_normal_noise
def _get_timestams_batch(self):
return torch.randint(low=1, high=self.num_noise_steps, size=(self.batch_size,))
def generate_images_batch(self):
# start from pure noise batch
x = torch.randn((self.batch_size, 3, self.img_size, self.img_size)).to(
self.device
)
# and apply self.num_noise_steps denoising steps with model
for t_i in tqdm(reversed(range(1, self.num_noise_steps)), position=0):
# Build tensor with timestamp index. Same for each element in batch
t = torch.full((self.batch_size,), t_i).long().to(self.device)
# predict noise on current timestamp
with torch.inference_mode():
pred_noise = self.model(x, t).detach()
# restore noise parametrs on current timestamp
alpha = self.alpha[t.to("cpu")][:, None, None, None].to(self.device)
alpha_hat = self.alpha_hat[t.to("cpu")][:, None, None, None].to(self.device)
beta = self.beta[t.to("cpu")][:, None, None, None].to(self.device)
# partialy denoise batch of images
x = x - (1.0 - alpha) / (1 - alpha_hat).sqrt() * pred_noise
x = (1 / alpha.sqrt()) * x
if self.save_progress and t_i % 20 == 0:
prog_x = x.clamp(0, 1)
prog_x = (prog_x * 255).type(torch.uint8)
self._save_img(imgs=prog_x, path=self.path / "progress" / f"{t_i}.jpg")
# add appropriate amount of noise for next step if any
if t_i > 0:
z = torch.randn_like(x).to(self.device)
x = x + beta.sqrt() * z
# clip x to valid 0..255 image range
x = x.clamp(0, 1)
x = (x * 255).type(torch.uint8)
if self.save_progress:
self._save_img(imgs=x, path=self.path / "progress" / f"{t_i}.jpg")
return x
def training_step(self, batch, batch_idx):
# unpack data
images, labels = batch
self.batch_size = images.shape[0]
t = self._get_timestams_batch()
# prep batch of noised images
noised_images, target_noise = self._noise_images_batch(images, t)
# estimate noise with U-Net
predicted_noise = self.model(noised_images, t)
# optimize model to fit target noise
loss = self.criterion(predicted_noise, target_noise)
self.log("loss", loss, prog_bar=True, on_epoch=True, on_step=False)
return loss
def _save_img(self, imgs, path):
image_grid = make_grid(imgs)
# convert to numpy
ndarr = image_grid.permute(1, 2, 0).to("cpu").numpy()
# and save
im = Image.fromarray(ndarr)
im.save(path)
def on_train_epoch_end(self):
if self.save_images:
generated_images = self.generate_images_batch()
self._save_img(
imgs=generated_images,
path=self.path / f"model_{self.current_epoch}.jpg",
)
def predict_step(self, batch, batch_idx, dataloader_idx=0):
images, labels = batch
self.batch_size = images.shape[0]
return self.generate_images_batch()
INFO: Seed set to 42 INFO:lightning.fabric.utilities.seed:Seed set to 42
!pip install -q astronn
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 9.3/9.3 MB 25.5 MB/s eta 0:00:00 ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 5.3/5.3 MB 52.0 MB/s eta 0:00:00 ━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 910.2/910.2 kB 72.8 MB/s eta 0:00:00
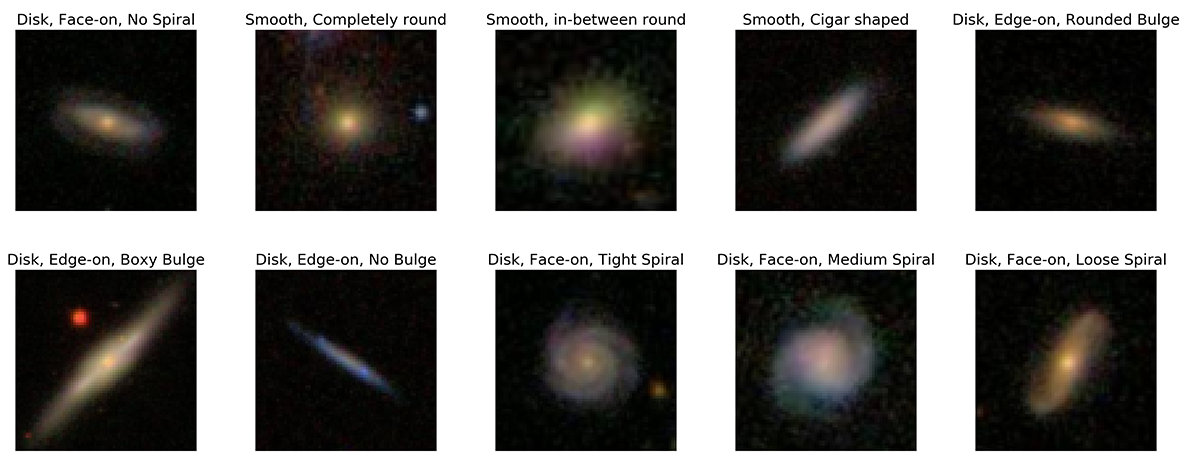
Рассмотрим пример использования определенной выше диффузионной модели генерации на примере датасета Galaxy10
from astroNN.datasets import load_galaxy10
images, labels = load_galaxy10()
Galaxy10_DECals.h5: 100%|█████████▉| 2.73G/2.74G [00:28<00:00, 37.8MB/s]
Downloaded Galaxy10 successfully to /root/.astroNN/datasets/Galaxy10_DECals.h5
Galaxy10_DECals.h5: 2.74GB [00:36, 74.9MB/s]
from torch.utils.data.dataset import Dataset
class GalaxyDataset(Dataset):
def __init__(self, images, labels, transform):
super().__init__()
self.images = images
self.labels = labels
self.transform = transform
def __getitem__(self, indx):
image = self.images[indx]
label = self.labels[indx]
if self.transform:
image = self.transform(image)
return image, label
def __len__(self):
return len(self.images)
from torchvision import transforms
transform = transforms.Compose(
[
transforms.ToTensor(),
transforms.Resize(64, antialias=True),
transforms.RandomHorizontalFlip(0.5),
transforms.RandomVerticalFlip(0.5),
]
)
dataset = GalaxyDataset(images, labels, transform)
Обучение сети осуществляется следующим образом. Процесс занимает продолжительное время.
!mkdir /content/diffusion/
!mkdir /content/diffusion/lightning_logs
from lightning.pytorch.callbacks import ModelCheckpoint
path = "/content/diffusion/"
train_loader = torch.utils.data.DataLoader(
dataset, batch_size=8, shuffle=True, drop_last=True, num_workers=2
)
checkpoint_callback = ModelCheckpoint(
dirpath=path,
save_last=True,
every_n_epochs=1,
save_top_k=1,
monitor="loss",
filename="best",
mode="min",
)
model = UNet()
ddpm = DiffusionGenerativeModel(model, path, save_progress=False)
trainer = L.Trainer(
max_epochs=200,
callbacks=[checkpoint_callback],
log_every_n_steps=100,
logger=L.pytorch.loggers.TensorBoardLogger(save_dir=path),
)
# trainer.fit(model=ddpm, train_dataloaders=train_loader)
INFO: GPU available: True (cuda), used: True INFO:lightning.pytorch.utilities.rank_zero:GPU available: True (cuda), used: True INFO: TPU available: False, using: 0 TPU cores INFO:lightning.pytorch.utilities.rank_zero:TPU available: False, using: 0 TPU cores INFO: IPU available: False, using: 0 IPUs INFO:lightning.pytorch.utilities.rank_zero:IPU available: False, using: 0 IPUs INFO: HPU available: False, using: 0 HPUs INFO:lightning.pytorch.utilities.rank_zero:HPU available: False, using: 0 HPUs
Посмотрим на изображения, сгенерированные необученной моделью:
import matplotlib.pyplot as plt
from warnings import simplefilter
simplefilter("ignore", RuntimeWarning)
dataset = GalaxyDataset(images[:16], labels[:16], transform)
gen_loader = torch.utils.data.DataLoader(
dataset, batch_size=16, shuffle=False, num_workers=2
) # just for image num
generated_images = trainer.predict(ddpm, gen_loader)[0]
image_grid = make_grid(generated_images)
# convert to numpy
ndarr = image_grid.permute(1, 2, 0).to("cpu").numpy()
# and show
image = Image.fromarray(ndarr)
fig = plt.figure(figsize=(14, 5))
plt.imshow(image)
plt.axis("off")
plt.show()
INFO: LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0] INFO:lightning.pytorch.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
Predicting: | | 0/? [00:00<?, ?it/s]
0it [00:00, ?it/s]

Видим, что сгенерированные изображения представляют собой шум.
Загрузим веса предобученной модели:
!mkdir /content/diffusion/progress
!wget -q https://edunet.kea.su/repo/EduNet-content/dev-2.0/L13/weights/unconditioned_baseline.pt
model = UNet()
model.load_state_dict(
torch.load("/content/unconditioned_baseline.pt", map_location="cpu")
)
ddpm = DiffusionGenerativeModel(model, path)
generated_images = trainer.predict(ddpm, gen_loader)[0]
image_grid = make_grid(generated_images)
# convert to numpy
ndarr = image_grid.permute(1, 2, 0).to("cpu").numpy()
# and show
image = Image.fromarray(ndarr)
fig = plt.figure(figsize=(14, 5))
plt.imshow(image)
plt.axis("off")
plt.show()
INFO: LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0] INFO:lightning.pytorch.accelerators.cuda:LOCAL_RANK: 0 - CUDA_VISIBLE_DEVICES: [0]
Predicting: | | 0/? [00:00<?, ?it/s]
0it [00:00, ?it/s]

Понаблюдаем за процессом генерации:
import os
import imageio.v2 as imageio
path = Path("/content/diffusion/progress")
files = os.listdir(path)
files.sort(key=lambda x: int(x.split(".")[0]), reverse=True)
images = []
for file_name in files:
images.append(imageio.imread(path / file_name))
imageio.mimsave("./progress.gif", images)
from IPython.display import Image, display
image = Image(filename="./progress.gif", width=1000)
display(image)
<IPython.core.display.Image object>
Как мы упомянули выше, попиксельный self-attention — вычислительно тяжелый слой. В 2022 году вышла статья 🎓[arxiv], предлагающая объединение VAE и DM.
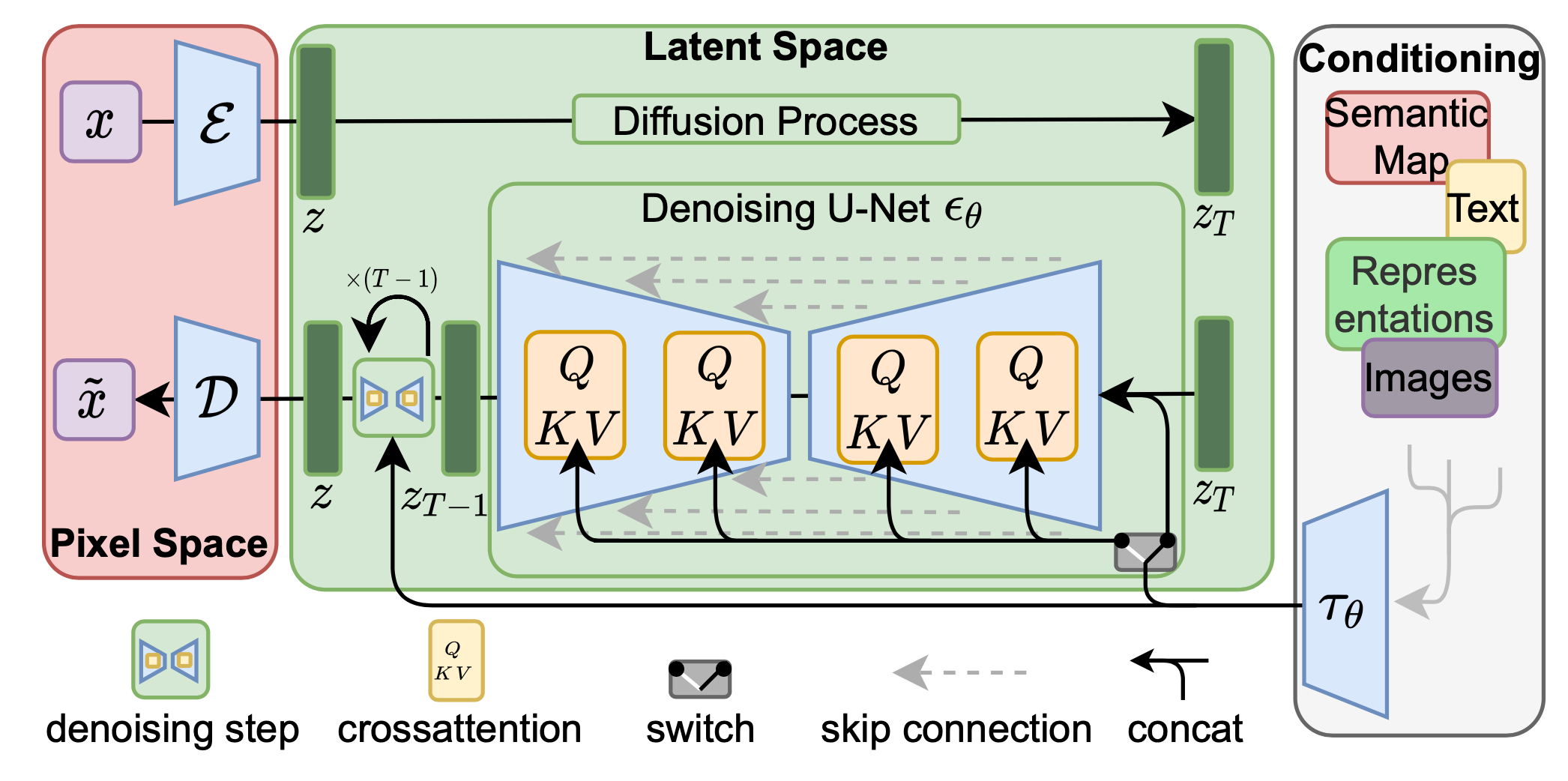
Отметим некоторые особенности архитектуры:
Большое количество предобученных диффузионных моделей доступно в библиотеке diffusers 🛠️[doc] от Hugging Face 🛠️[doc]. Там же можно найти код для обучения или дообучения моделей.
Для примера попробуем загрузить предобученную text-to-image модель stable-diffusion-v1-5 и сгенерировать изображение с ее помощью.
!pip install -q diffusers
from diffusers import AutoPipelineForText2Image
from IPython.display import clear_output
pipe = AutoPipelineForText2Image.from_pretrained(
"runwayml/stable-diffusion-v1-5", torch_dtype=torch.float16, variant="fp16"
)
clear_output()
pipe.enable_model_cpu_offload()
prompt = "stained glass of darth vader, backlight, centered composition, masterpiece, photorealistic, 8k"
image = pipe(
prompt=prompt,
).images[0]
image
0%| | 0/50 [00:00<?, ?it/s]

Литература
GAN:
DCGAN:
Wasserstein GAN:
ProGAN → StyleGAN → StyleGAN2 → Alias-Free GAN:
Тонкости обучения GAN:
BigGAN:
StackGAN:
ControlGAN:
AC-GAN:
Domain Transfer Network:
Pix2Pix:
Семантическая генерация:
Text-to-Image:
Image-to-Image:
Дополнительно: